问题 P 若存在算法,则将所有算法中最低的复杂度称为 P 的难度。一旦算法的复杂度达到难度下界,则说明就 big-O-notation 而言,算法已达到最优。
有多种角度可以估算时间、空间的复杂度:
- 最好 best-case
- 最坏 worst-case
- 平均 average-case
- 分摊 amortized 对最坏情况的估计最保守、稳妥,因此首先考虑最坏情况下的最优算法。
判定树
以排序为例分析判定树
以排序为例,排序时间主要取决于:
- 关键码比较次数
key comparison # - 元素交换次数
data swap #
那么排序算法最快有多快?语境不同答案不同,可以是指最坏情况时的最优算法,也可以是对一类主流算法而言……
基于比较的算法(CBA, comparison-based algo)在最坏情况下,都需要 时间才能排序完成。
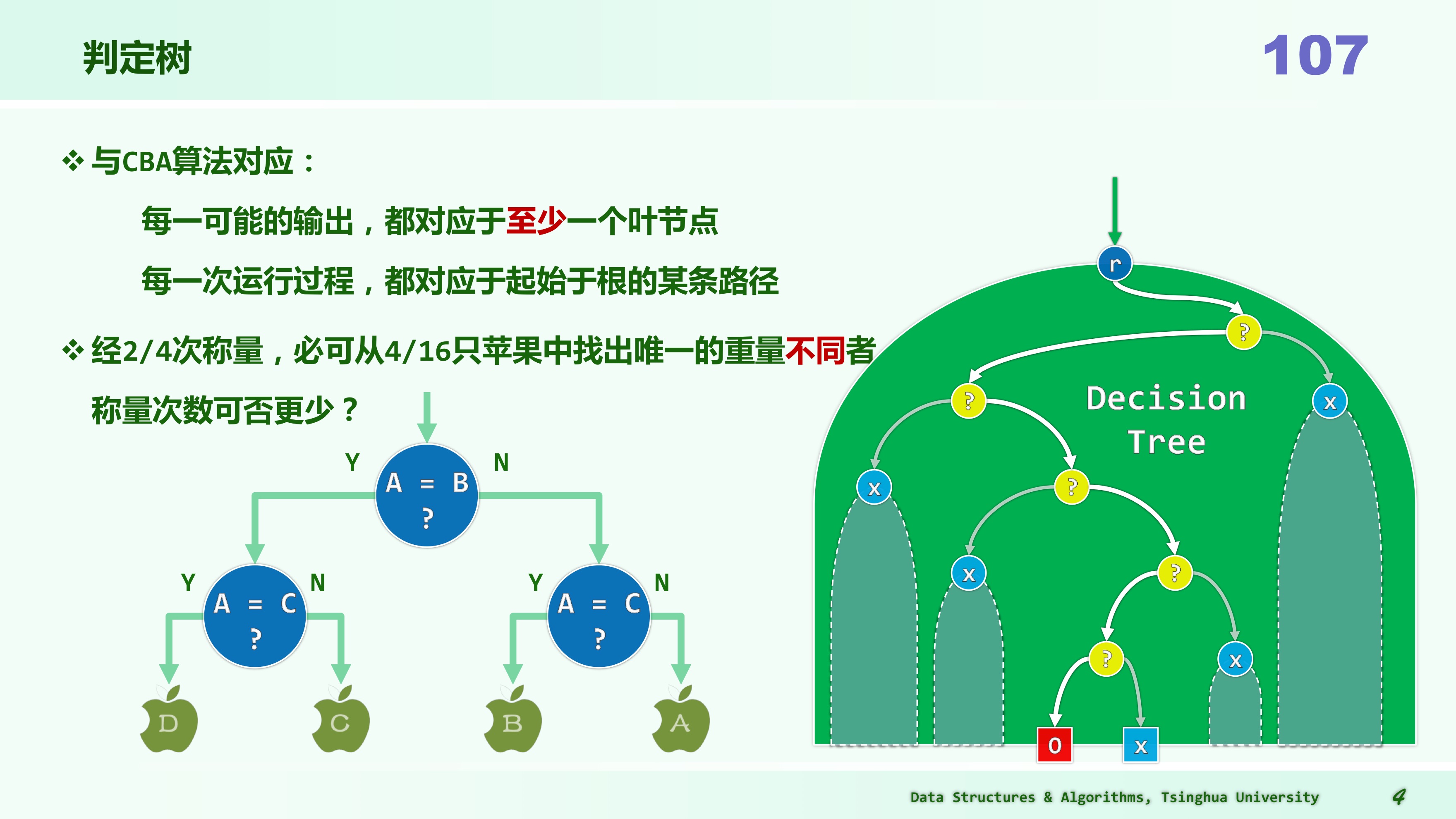
与 CBA 算法对应的判定树:每一可能的输出都至少对应于判定树的一个叶节点,每一次运行过程都对应起始于根的某条路径。
比较树
比较树 Comparison Tree:
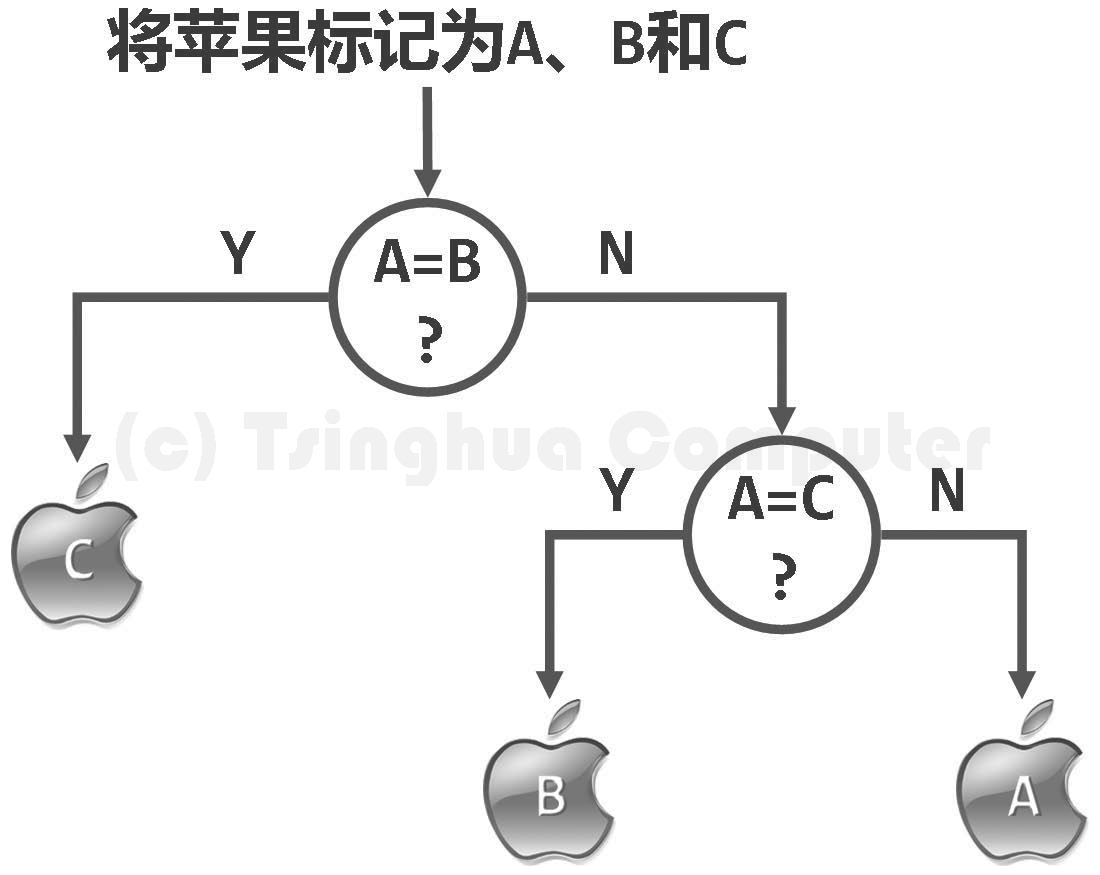 用圆节点表示算法过程中不同的状态,用有方向的边表示不同状态之间的相互转换,叶节点表示经一系列计算后某次运行的终止状态。
用圆节点表示算法过程中不同的状态,用有方向的边表示不同状态之间的相互转换,叶节点表示经一系列计算后某次运行的终止状态。
性质
- 所有内部节点各对应于一次比对操作;
- 内部节点的左右分支,分别对应于在两种比对结果下的执行方向;
- 叶节点对应于算法某次执行的完整过程的输出;
代数判定树
针对 CBA 式算法,给定输入规模,将所有可能的输入所对应的一系列判断表示出来,就是代数判定树algebraic decision tree。
代数判定树是对比较树的推广,其中节点对应于根据某一代数表达式做出的判断。例如,比较树中各节点所对应的“a == b”以及“a < b” ,均可统一为根据一次代数表达式“a - b”取值符号的判断断。
代数判定:使用某一常次数代数多项式,将任意一组关键码作为变量,对多项式求值,根据结果的符号,确定算法推进的方向。
flowchart TD start-->A["f(K1,K2,...,Kn)"]-->B[+] & C[0] & D[-]
CBA排序算法下界
比较树是三叉树 ternary tree,每一叶节点对应于起自根节点的一条通路,这条通路是某一可能的运行过程,叶节点对应的就是输出结果。
因此有三个等价关系:
- 叶的深度 比较次数 计算成本
- 树高 最坏情况时的计算成本
- 树高的下界 所有 CBA 的时间复杂度的下界
对于排序算法,必定有 :每一次输出对应于某一置换,依此置换可以将输入序列转换为有序序列。包含 N 个叶节点的排序算法 ADT,高度不低于
线性规约
规约 reduction 是确定下界的另一工具。
规约的详细定义
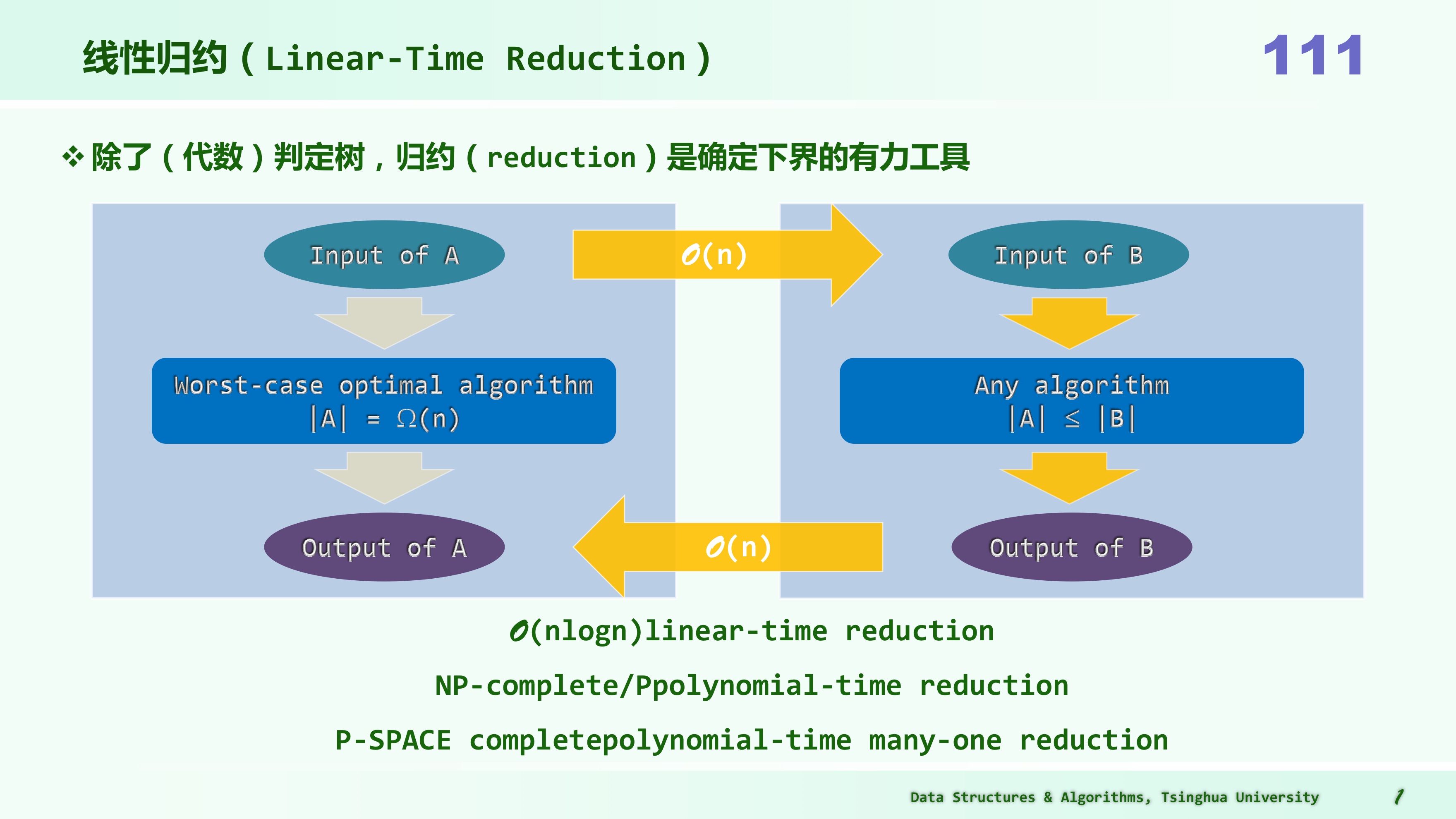
一般地,考查难度待界定的问题 B。若另一问题 A 满足以下性质: 1)问题 A 的任一输入,都可以在线性时间内转换为问题 B 的输入 2)问题 B 的任一输出,都可以在线性时间内转换为问题 A 的输出 则称“问题 A 可在线性时间内归约为问题 B”,或简称作“问题 A 可线性归约为问题 B”,或者称“从问题 A 到问题 B,存在一个线性(时间)归约(linear-time reduction)关系”,记作:
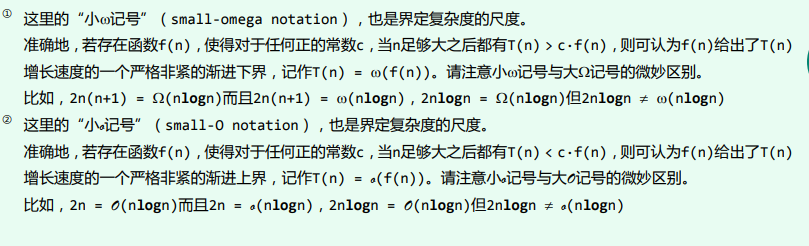
此时,若问题 A 的难度(记作|A|)已界定为严格地高于Ω(n),亦即:
|A| = Ω(f (n)) = ω(n)
则问题 B 的难度(记作|B|)也不会低于这个复杂度下界,亦即:
|B| >= |A| = Ω(f (n))
实际上,若问题 A 果真可以线性归约为问题 B,则由后者的任一算法,必然同时也可以导出前者的一个算法。这一结论,可由图直接看出:为求解问题 A,可将其输入转化为问题 B 的输入,再调用后者的算法,最后将输出转化为前者的输出。
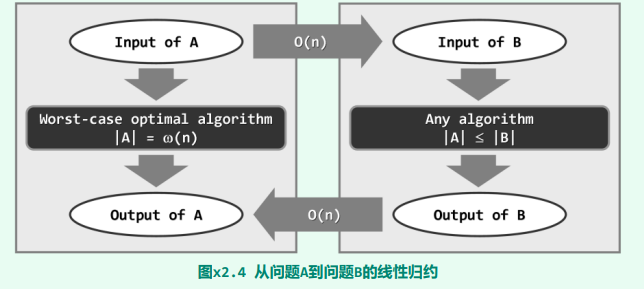
因此,假若问题 B 具有一个更低的下界,则至少存在一个 o (f (n))的算法,于是由上可知, 问题 A 也存在一个 o (f (n))的算法——这与问题 A 已知的 ω(n)下界相悖。
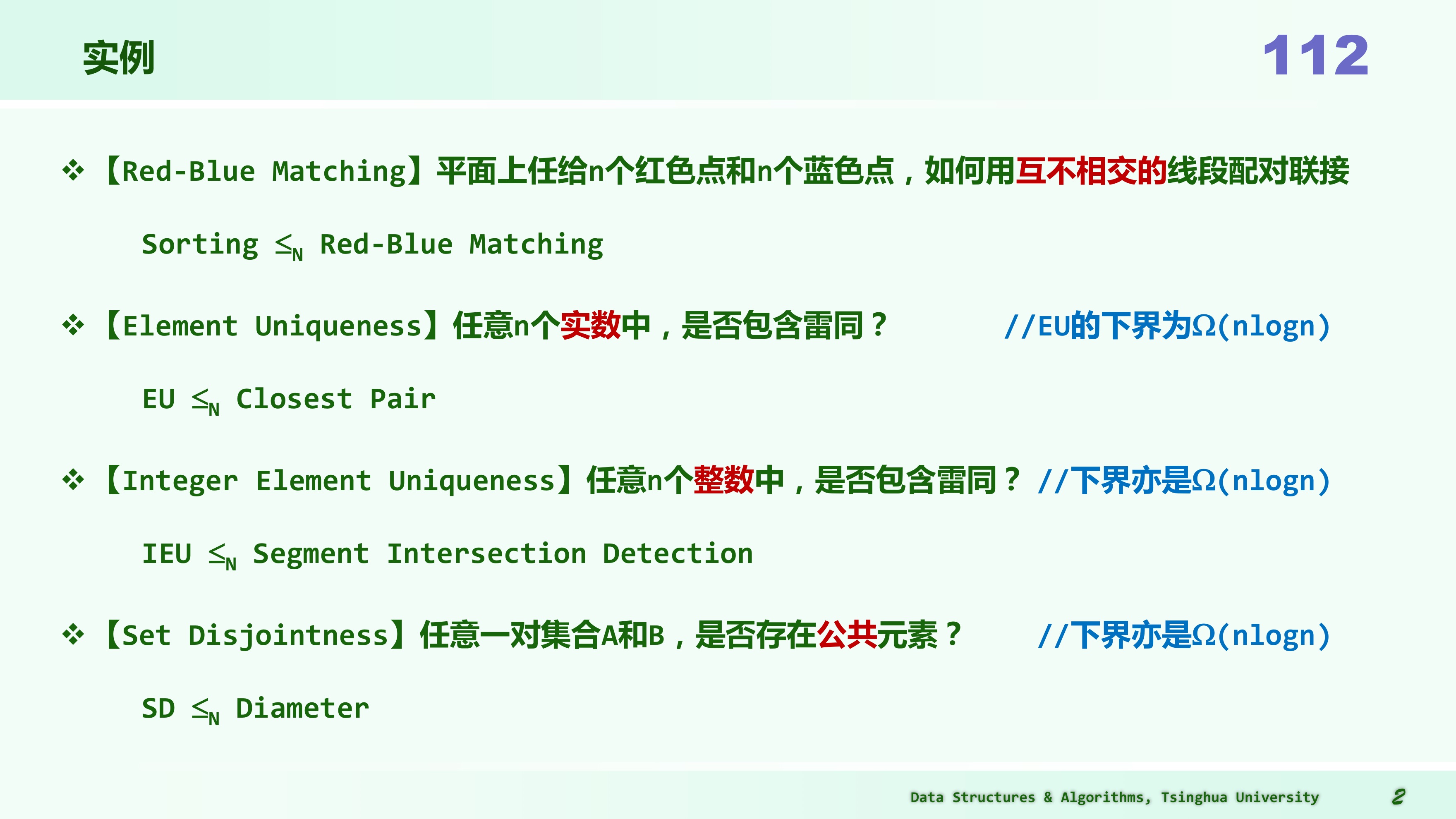
归纳起来,为运用线性归约界定问题 B 的难度下界,须经以下步骤: 1)找到难度已知为 ω(n)的问题 A 2)证明问题 A 可线性归约为问题 B——其输入、输出可在线性时间内完成转换