判断
- 若 AVL 树插入元素的过程中发生了旋转操作,则树高必不变。
❌
✅ AVL 树失衡后通过调整必回复原⾼度(如果没出现失衡,则树⾼可能发⽣改变)
- 若红黑树插入一个元素后,黑高度增加,则双红修正过程中没有拓扑结构变换,只有重染色操作。
❌
✅ 双红修正 RR-2: 双红修正
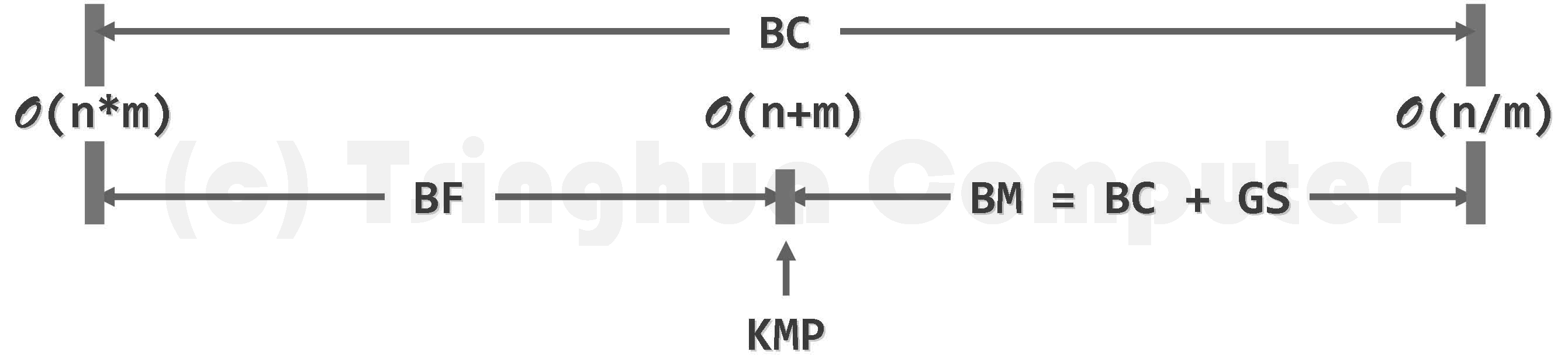
- 若 KMP 算法不使用改进版的 next 表,最坏情况下时间复杂度可能达到 O(mn)。
❌ 最坏情况下也不过 O(m+n)
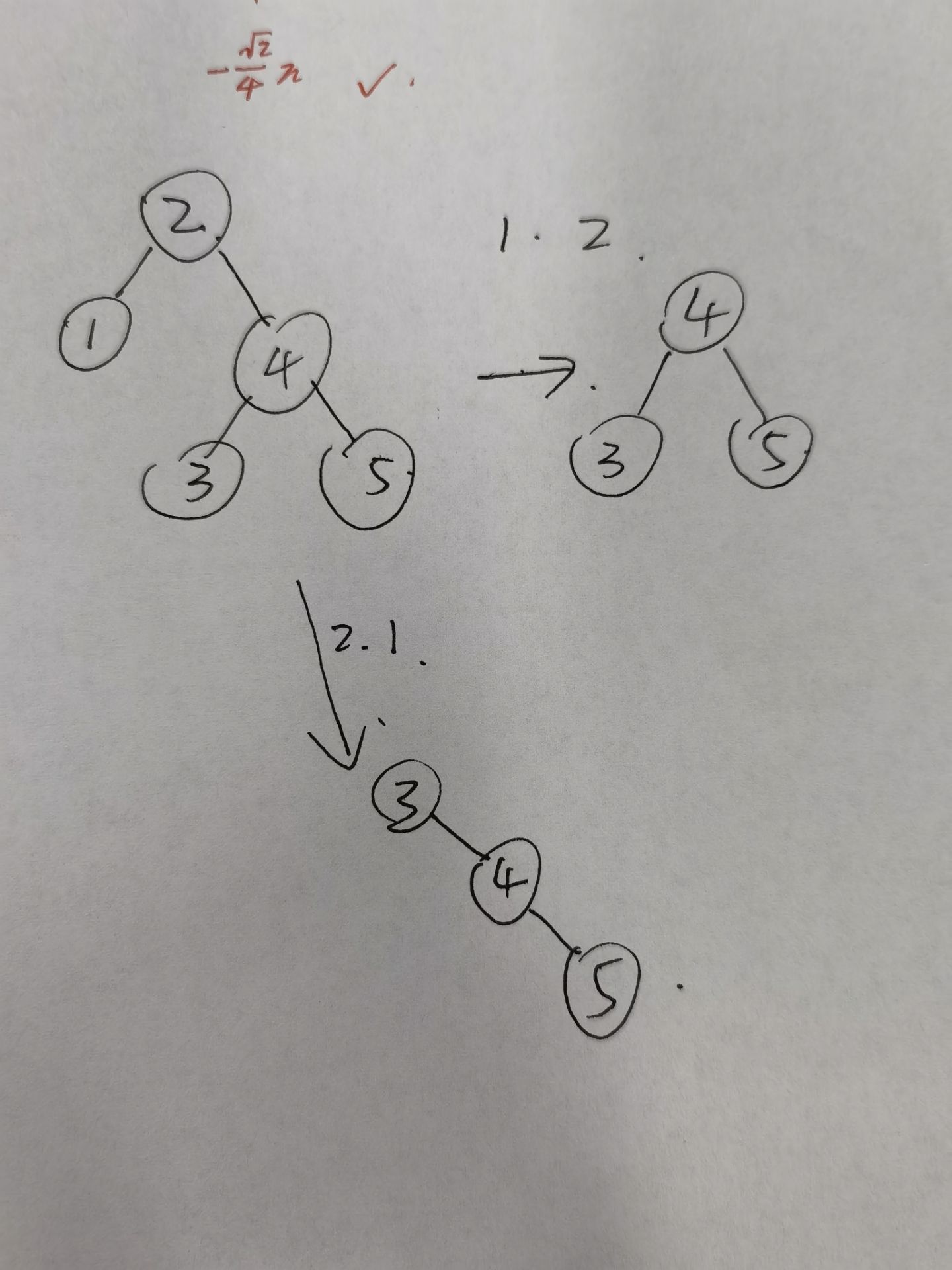
- 在 BST 中删除两个节点,则无论先删除哪个节点,最终 BST 的拓扑结构均相同。
❌ splay 树中的删除操作会改变整体的形态,实例如下: 原 Splay tree:
删除 8、4 后的形态:
删除 4、8 后的形态:
事实上即使是 BST 也是不能保证的:
- 完全二叉堆删除元素在最坏情况下时间复杂度为 O(log n),但平均情况下仅为 O(1)。
❌ 完全二叉堆插入的平均复杂度可以是 O (1),但删除并不可以。删除操作由于是将底层节点放置顶层再下滤,那么由于底层通常数据较小,会造成多次下滤。
- 在任何情况下,伸展树总能保持每次操作 O(log n) 的平均复杂度。
✅
- 对于左式堆 A 和 B,合并后所得二叉堆的右侧链元素一定来自 A 和 B 的右侧链。
❌ 左式堆只是保证左倾侧,但是并不能保证右子堆一定比左子堆小,由此导致左右子堆可能会交换。
- 如果元素理想随机,那么对二叉搜索树做平衡化处理,对改进其渐进时间复杂度并没有什么卵用。
✅
- 采用双向平方试探策略时,将散列表长度取作素数 M = 4k + 3,可以极大地降低查找链前 M 个位置冲突的概率,但仍不能杜绝。
❌ 4k+3的素数表长并使用双向平方试探策略,在前 M 个位置不会遇到冲突。
- 在使用 Heapify 批量建堆的过程中,改变同层节点的下滤次序对算法的正确性和时间效率都无影响。
✅ 习题 10-7:10-7 Floyd 建堆法中同层内部节点下滤次序的影响
- 在 kd-search 中,查找区间 R 与任一节点的 4 个孙节点(假设存在)对应区域最多有 2 个相交。
✅ (考研不考) 习题解析 8-16:[[62-BST-Exercise#8-16-kdsearch-的结论证明|8-16
kdSearch()的结论证明]] 书上的结论写的是四个孙节点中的⾄多两个节点会相交(注意这⾥对相交的定义)
- 在 n 个节点的跳转表中,塔高的平均值为 O(log n)。
❌ 塔高期望为 2
- 既然可以在 O(n) 时间内找出 n 个数的中位数,快速排序算法 (12-A1) 即可优化至 O(nlogn)。
✅
- 将 N 个关键码按随机次序插入 B 树,则期望的分裂次数为 。
✅ 习题 8-6:8-6 考查 BTree 节点插入导致的分裂次数
- 与二叉堆相比,多叉堆 delMax() 操作时间复杂度更高。
✅老问题,还是考虑三叉对和四叉堆这两个特殊情况。
- 若元素理想随机,则用除余法作为散列函数时,即使区间长度不是素数,也不会影响数据的均匀性。
✅ PPT 除余法那一节:M 不是素数可以吗?
- 与胜者树相比,败者树在重赛过程中,需反复将节点与其兄弟进行比较。
❌ 正好搞反
- 在图的优先级搜索过程中,每次可能调用多次 prioUpdater,但累计调用次数仍为 O(e)。
✅ 调用 prioUpdater 与否,取决于邻居的总数,因此也就是边的总数。
- 若序列中逆序对个数为 O(n^2),则使用快速排序 (12-A1) 须进行的交换次数为 O(nlogn)。
❌ 完全逆序时,逆序对个数为 ,但是快排需要的交换次数也为
- 如果把朋友圈视为一无向图,那么即使 A 君看不到你给 B 点的赞,你们仍可能属于同一个双联通分量。
✅ “我”是关节点
选择
- 二叉堆中某个节点秩为 k,则其兄弟节点(假设存在)的秩为( D )
A. k + 1 B. k − 1 C. k + (−1)^k D. k − (−1)^k E. 以上皆非
兄弟节点只存在于同一父亲下,又由于是二叉堆,因此兄弟只会有一个。
- 由 5 个互异节点构成的不同的 BST 共有( D )个 A. 24 B. 30 C. 36 D. 42 E. 120
Catalan(5) = 42
- 有 2015 个节点的左式堆,左子堆最小规模为( )(不计外部节点) A. 10 B. 11 C. 1007 D. 1008 E. 以上皆非
E. 可以是 1
- 与 MAD 相比,除余法在( B, C )有缺陷 A. 计算速度 B. 高阶均匀性 C. 不动点 D. 满射性 E. 以上皆非
MAD 改善了零阶均匀和不动点问题。 除余法中存在着两方面的缺陷:
- 不动点:无论表长 M 取值如何,总有 hash(0)= 0
- 零阶均匀:
[0, R)的关键码,平均分配至 M 个桶;但相邻关键码的散列地址也必相邻
- 以下数据结构,在插入元素后可能导致 O (log n) 次局部结构调整的是( B, D ) A. AVL B. B-树 C. 红黑树 D. 伸展树 E. 以上皆非
AVL 插入元素只会导致 O (1)次局部调整 B-tree 插入元素可能导致一直上溢分裂到根,即 O (logn)次调整 红黑树局部结构调整不会超过 O (1) 伸展树插入元素会放置到根部,也是 O (logn)次调整
- 对小写字母集的串匹配,KMP 算法与蛮力算法在( A, C )情况下渐进的时间复杂度相同 A. 最好 B. 最坏 C. 平均 D. 以上皆非
平均情况的细致分析可以看习题 11-9:11-9 分析蛮力算法的实际效率
- 对随机生成的二进制串,gs 表中
gs[0]=1的概率为( ) A. B. C. D.
不会 答案给出的解析:B. 所有元素相等时
- 以下数据结构,空间复杂度为线性的是( A ) A. 2d-tree B. range tree C. interval tree D. segment tree E. 以上皆非
A, C, D
- 人类拥有的数字化数据数量,在 2010 年已达到 ZB (2^70 = 10^21) 量级。若每个字节自成一个关键码,用一颗 16 阶 B-树存放,则可能的高度为( B ) A. 10 B. 20 C. 40 D. 80 E. >80
= 18~23
- 在 BST 中查找 365,以下查找序列中不可能出现的是( B, D ) A. 912, 204, 911, 265, 344, 380, 365 B. 89, 768, 456, 372, 326, 378, 365 C. 48, 260, 570, 302, 340, 380, 361, 365 D. 726, 521, 201, 328, 384, 319, 365
B 372→326→378 这里违背了 BST 左子树小于子树根节点的规则 D 328→384→319 同理
综合
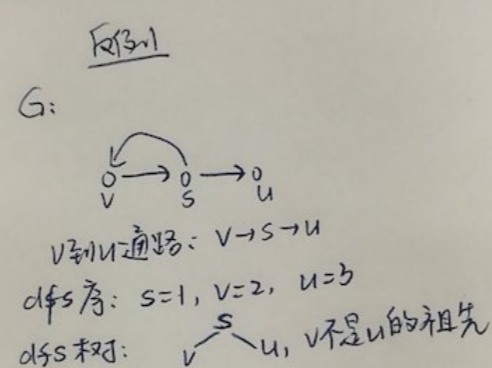
- 在有向图 G 中,存在一条自顶点 V 通向 u 的路径,且在某次 DFS 中有
dTime[v]<dTime[u],则在这次 DFS 所生成的 DFS 森林中,v 是否一定是 u 的祖先?若是,请给出证明; 若不是,请举出反例。
不是。
- 对闭散列
[0, M),,采用如下冲突排列解决方法:- 初始时,c = d = 0
- 探查 key 冲突时,
c <- c + 1,d <- d + c,探查H[(key+d)%M] - 则这种算法是否可以保证空间能被 100% 利用?若是,请给出证明;若不是,请举出反例。
d 的探查序列为:0+1,1+2,3+3,6+4,10+5,… 由递推公式 ,解得 如果设置表长为 8,则秩为 0,1,2,3,5,6,7 的位置会有元素填入,但秩为 4 的地方永远没有元素,故不能保证 100% 利用。
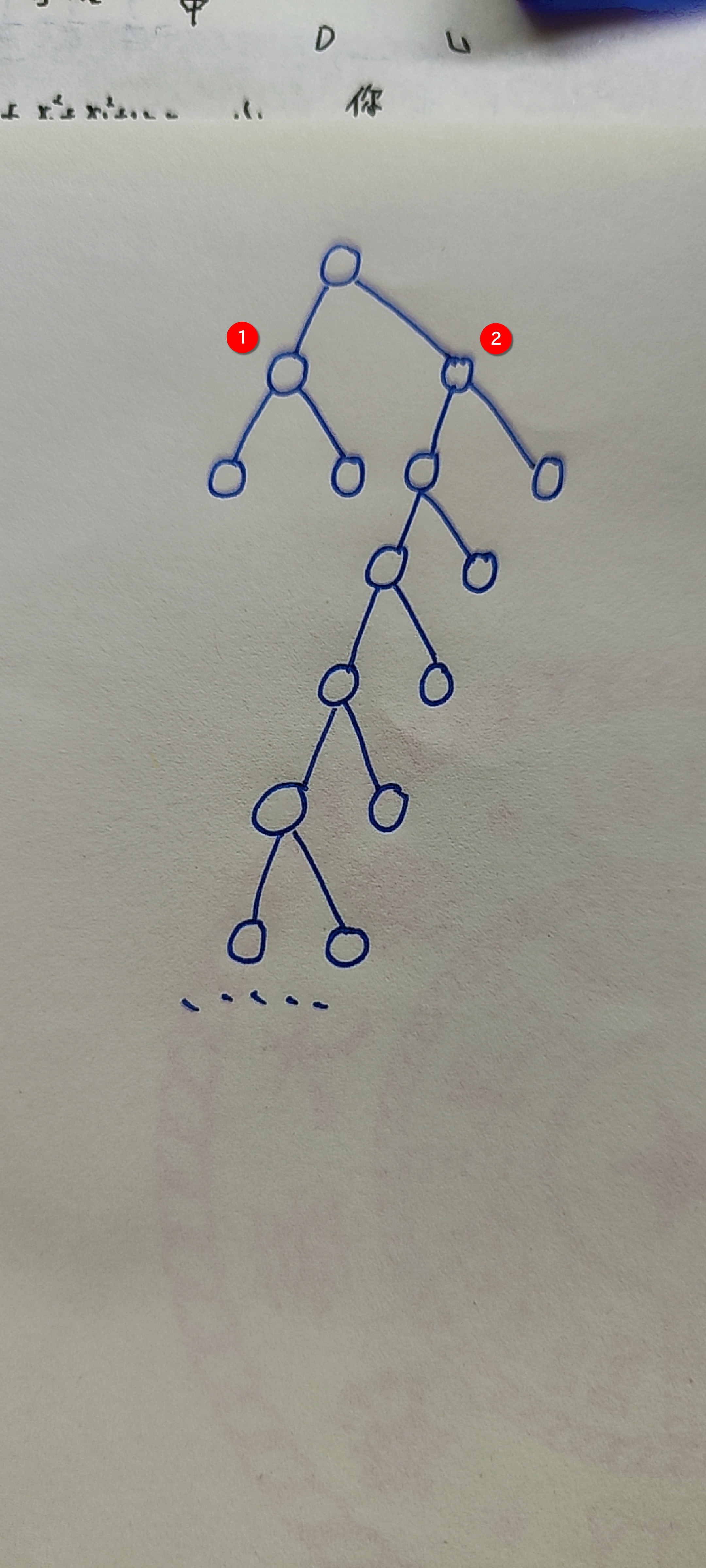
- 在不改变 BST 和 BinNode 定义的前提下(BinNode 仅存储 parent, data, lc, rc),设计算法,使得从节点 x 出发,查找值为 Y 的节点 y 的时间复杂度为 o (d), d 为节点 x 与 y 的距离。要求利用树的局部性,复杂度与总树高无关,否则将不能按满分起评。函数定义式:参量为 BinNode x, y, T,返回值为 BinNode 类型,函数名 fingerSearch。 (a) 说明算法思路
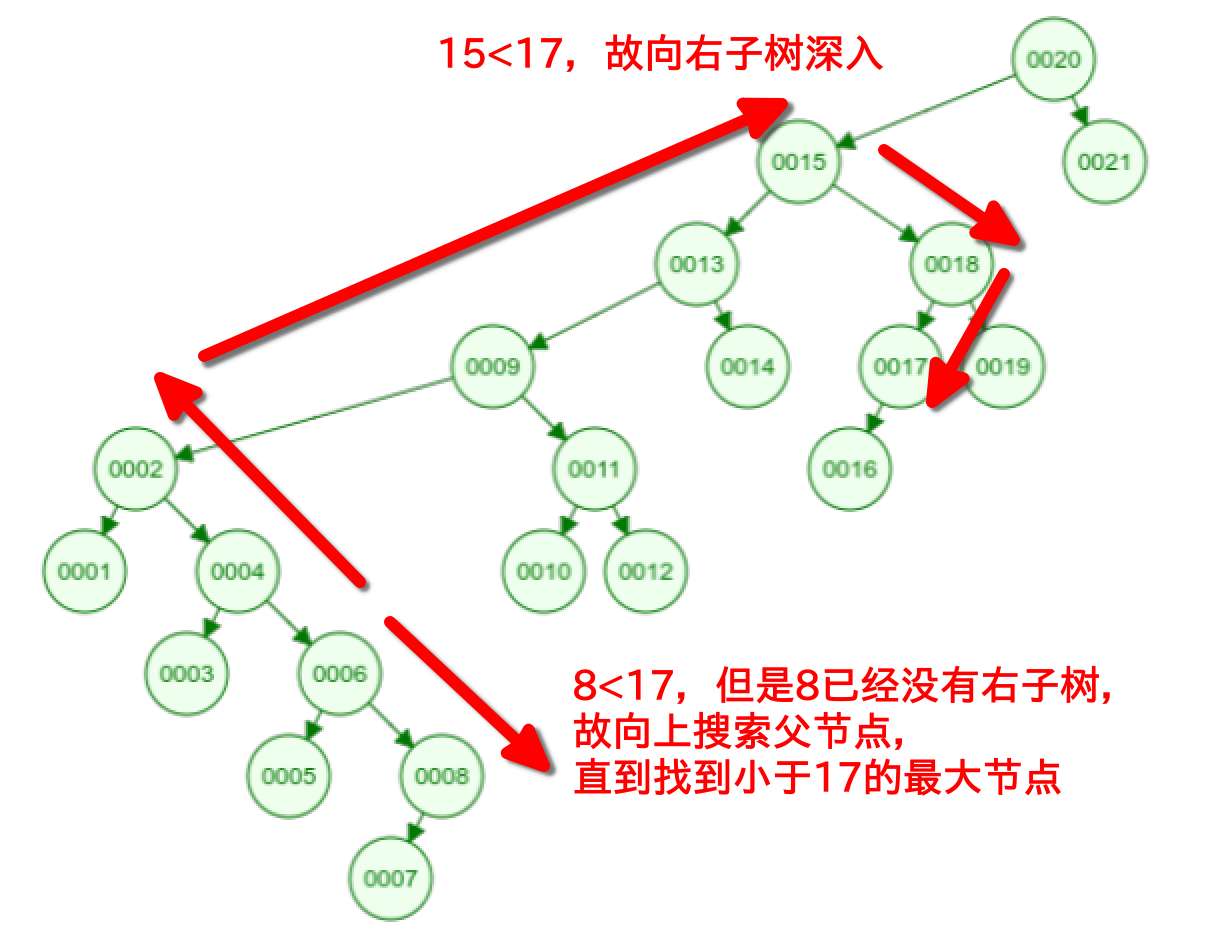
fingersearch:69-Finger-Search 简要地说,若搜索目标 y<起始节点 x,则向左搜索目标,具体地可以先搜索 x 的左子树,若左子树中存在则返回,若左子树中找到小于 y 的节点,则从对应节点的右子树开始搜索;若在 x 的左子树中未找到,则找到 x 的父亲,然后从 x 的父亲向左继续搜索,直到确定不大于 y 的最大者。
(b) 写出伪代码
(c) 在图中画出由值为 6 的点查找值为 17 的点的查找路径
(d) 说明算法时间复杂度为 O(d)(若无法达到,说明困难在哪)
显而易见,非路径上的节点,遍历的数量非常有限。