10-2 哨兵处理越界
描述:基于向量实现完全二叉堆时,也可在向量中将各节点依次后移一个单元,并在腾出的首单元中置入对应元素类型的最大值作为哨兵(比如,对于整型可取 INT_MAX)。如此,虽然多使用了一个单元,但在上滤过程中只需比较父子节点的大小,而无需核对是否已经越界。
- 如此转换后,父子节点在物理上的秩之间换算关系如何调整? 具体地,若节点 v 的编号(秩)记作 i(v),则根节点及其后代节点的编号分别为:
- i (root) = 1
- i (lchild (root)) = 2
- i (rchild (root)) = 3
- i (lchild (lchild (root)) = 4 …
一般地有:
- 若节点 v 有左孩子,则 i (lchild (v)) = 2∙i (v);
- 若节点 v 有右孩子,则 i (rchild (v)) = 2∙i (v) + 1;
- 若节点 v 有父节点,则 i (parent (v)) = = ;
-
如此改进后,insert 和 delMax 操作时间复杂度有何变化? 如此调整之后,上滤的过程无需核对是否已经越界,因此可以在一定程度上提高插入操作的效率,但渐进时间复杂度依然保持为 O(logn)。当然,以上调整对下滤的过程及效率没有影响。
-
对于不易甚至无法定义最大值的元素类型,上述技巧不再适用。
10-3 降低上滤、下滤操作中 swap 的赋值次数
描述:percolateUp、percolateDown 算法中,若实际上升或下降 k = O(logn)层,则 k 次 swap()操作共需 3k 次赋值。 试改进以上实现,将此类赋值操作降至 k + 1 次。
在插入接口的上滤过程中,新元素可暂且不予插入,而只是将其上若干代祖先节点依次下移;待所有祖先均已就位之后,才将新元素置入腾出的空节点。删除接口的下滤过程,与此同理。
10-4 O (1)时间确定祖先的秩
考查基于向量实现的任一完全二叉堆。
我们注意到,其中祖先与后代节点的秩之间存在某种关联关系。具体地,只需令各节点的秩统一地递增一个单位,则从秩的二进制表示的角度来看,祖先必是后代的前缀。
 以如图所示的完全二叉堆为例,考查其中节点18所对应的查找路径:
沿途各节点的秩依次为: 0, 1, 3, 8, 18
统一递增之后,依次为: 1, 2, 4, 9, 19
对应的二进制表示依次为: 1, 10, 100, 1001, 10011
以如图所示的完全二叉堆为例,考查其中节点18所对应的查找路径:
沿途各节点的秩依次为: 0, 1, 3, 8, 18
统一递增之后,依次为: 1, 2, 4, 9, 19
对应的二进制表示依次为: 1, 10, 100, 1001, 10011
可以看到,位数依次递增。而且更重要的是,相邻的每一对中,前者总是后者的前缀。 因此,对于任何秩为r的元素,其上溯第h代祖先(若存在)所对应的秩必然为: ((r + 1) >> h) - 1
10-4-b 将 percolateUp 算法的比较次数优化到 O (loglogn)
由上一题指出的特性,在引入新节点但尚未上滤调整之前,可以将该节点对应的查找路径视作一个静态查询表,并使用二分查找算法。
具体地,每次都可在 O(1)时间内确定高度居中的祖先的秩;将其当作轴点,只需再做 O(1) 次比较,即可将查找范围缩小一半。如此反复迭代,直至查找范围内仅剩单个节点。
既然完全二叉堆的高度 h = O(logn),故整个查找过程的迭代(比较操作)次数将不超过: logh = O(loglogn)
请注意,因为任一节点通往其后代的路径并不唯一,故这一技巧并不适用于下滤操作。
- 如此改进后,percolateUp 算法的总体渐进复杂度是否优化? 以上方法固然可以有效地减少词条的比较操作,但词条交换操作却不能减少。事实上无论何,在最坏情况下,依然需要执行 O(h) = O(logn)次交换操作。
由此可见,percolateUp 算法总体的渐进复杂度将保持不变。
- 通过实验确定,上述改进在完全二叉堆达到多大规模后才能体现出效果。 请读者独立完成编码和调试工作,并根据实测结果给出分析和结论。
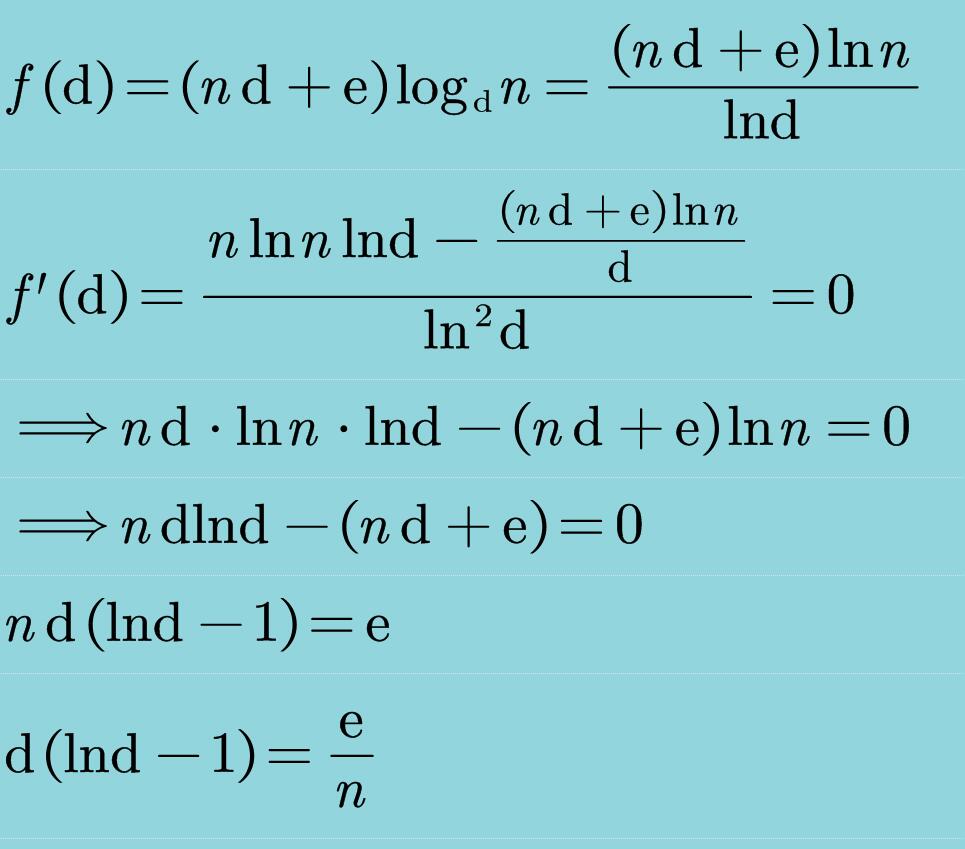
需要指出的是,对于通常的应用问题规模 n 而言,logn 与 loglogn 均已十分接近于常数,二者之间的差异并不明显。 以 n = 2^32 = 4 * 10^9为例,有: , 若再综合考虑到以上方法针对秩所额外引入的计算量,实际性能的差异将更不明显。
10-6 估算 percolateUp 的实际期望
描述:percolateUp()上滤算法,曾指出其执行时间为 O(logn)。然而,这只是对其最坏情况的估计;在通常的情况下,实际效率要远高于此。 试通过估算说明,在关键码均匀独立分布时,最坏情况极其罕见,且插入操作平均仅需常数时间。
在此仅做一个粗略的估算。 根据堆的定义及调整规则,若新节点 p 通过上滤升高了 k 层,则意味着在2^(k+1)个随机节点(p 的父亲、p,以及 p 的2^(k+1)- 2个后代)中,该节点恰好是第二大者。
于是,若将新节点累计上升的高度记作H,则H恰好为k的概率应为: Pr(H = k) = 1/2^(k+1) = (1/2)^k∙(1/2), 0 ⇐ k 这是一个典型的几何分布(geometric distribution),其数学期望为:E(H) = 1/(1/2) - 1 = 1
也就是说,每个节点经上滤后平均大致上升1层,其间平均需做1 + 1 = 2次比较操作。
10-7 Floyd 建堆法中同层内部节点下滤次序的影响
-
Floyd 建堆算法中,同层内部节点下滤的次序对建堆结果有无影响?若无影响,试说明原因;否则,试举一实例。 没有影响。 同层节点的下滤,仅涉及到其各自的后代,它们之间完全相互独立,故改变次序不致影响最终的结果。
-
对建堆时间有无影响? 也没有影响。 每个节点的下滤过程完全不变,所需时间不变,建堆所需的总体时间亦不变。
10-8 优先级队列与 Huffman 树
若将 Huffman 森林视作优先级队列,则其中每一棵树(每一个超字符)即是一个词条。为保 证词条之间可以相互比较,可如代码5.29(145页)所示重载对应的操作符。进一步地,因超字 符的优先级可度量为其对应权重的负值,故不妨将大小关系颠倒过来,令小权重超字符的优先级 更高,以便于操作接口的统一。 经上述准备,如下代码即可基于统一优先级队列接口给出通用的 Huffman 编码算法:
/************************************
* Huffman树构造算法:对传入的Huffman森林forest逐步合并,直到成为一棵树
************************************
* forest基于优先级队列实现,此算法适用于符合PQ接口的任何实现方式
* 为Huffman_PQ_List、Huffman_PQ_ComplHeap和Huffman_PQ_LeftHeap共用
* 编译前对应工程只需设置相应标志:DSA_PQ_List、DSA_PQ_ComplHeap或DSA_PQ_LeftHeap
************************************/
HuffTree* generateTree ( HuffForest* forest ) {
while ( 1 < forest->size() ) {
HuffTree* s1 = forest->delMax(); HuffTree* s2 = forest->delMax();
HuffTree* s = new HuffTree();
/*DSA*/printf ( "Merging " ); print ( s1->root()->data ); printf ( " with " ); print ( s2->root()->data ); printf ( " ...\n" );
s->insert ( HuffChar ( '^', s1->root()->data.weight + s2->root()->data.weight ) );
s->attach ( s1, s->root() ); s->attach ( s->root(), s2 );
forest->insert ( s ); //将合并后的Huffman树插回Huffman森林
}
HuffTree* tree = forest->delMax(); //至此,森林中的最后一棵树
return tree; //即全局Huffman编码树
}
相对于如代码5.36(147页)所示的版本,这里只不过将 minHChar()替换为 PQ::delMax() 标准接口。优先级队列的所有 ADT 操作均可在 O(logn)时间内完成,故 generateTree()算法也相应地可在 O(nlogn)时间内构造出 Huffman 编码树——较之原版本,改进显著。
- 试证明,任何 CBA 式 Huffman 树构造算法,在最坏情况下都需要运行Ω(nlogn)时间。 只需建立一个从排序问题,到 Huffman 编码问题的线性归约(习题2-12)。
事实上,对于每一个待排序的输入序列,我们都将其视作一组字符的出现频率。不失一般性, 这里可以假设每个元素均非负——否则,可以在 O(n)时间内令它们增加同一足够大的正数。
以下,以这组频率作为输入,可以调用任何 CBA 式算法构造出 Huffman 编码树。而一旦得到这样一棵编码树,只需一趟层次遍历,即可在 O(n)的时间内得到所有(叶)节点的遍历序列。 根据 Huffman 树的定义,该序列必然是单调的。因此,整个过程也等效于同时完成了对原输入序列的排序。
10-9 利用频率已有序的性质在 O (n)完成构建 Huffman 树
描述:在附加某些特定条件后,问题难度往往会有实质下降。比如,若待编码字符集已按出现频率排序,则 Huffman 编码可以更快完成。在编码过程中,始终将森林 F 中的树分为两类:单节点(尚未参与合并)和多节点(已合并过)。每经过一次迭代,后者虽不见得增多,但必然有一个新成员。
-
试证明,后一类树中,新成员的权重(频率)总是最大 根据 Huffman 编码算法的原理,每次迭代都是在当前森林中选取权重最小的两棵树做合并。 因此,被选出的树的权重必然单调非降,故在当前所有(经合成生成的)多节点树中,最新者的 权重必然最大。
-
试在有序序列中以 O (n)时间完成 Huffman 编码 将如上定义的两类节点,按权重次序组织为两个队列。
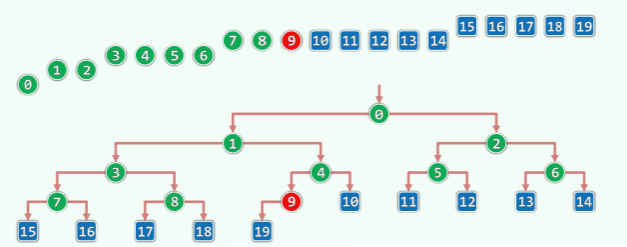
 初始状态如图x10.1(a)所示,所有字符都按照权重非降的次序,存入单节点树的队列(左);而多节点树的队列(右),直接置空。 此后的过程与常规的Huffman编码算法类似,也是反复地取出权重最小的两棵树,将其合并后插回森林。直至最后只剩一棵树。
初始状态如图x10.1(a)所示,所有字符都按照权重非降的次序,存入单节点树的队列(左);而多节点树的队列(右),直接置空。 此后的过程与常规的Huffman编码算法类似,也是反复地取出权重最小的两棵树,将其合并后插回森林。直至最后只剩一棵树。
这里与常规算法的本质不同,共有两点。首先,每次只需考查两个队列各自最前端的两棵树。 也就是说,每次只需检查不超过四棵树,即可在 O(1)的时间内挑选出整个森林中权重最小的两棵树。另外,这两棵树合并之后,直接作为末元素插入多节点树的队列。
根据 1) 的分析结论, 这样依然可以保持该队列的单调性。 作为一个完整的实例,图 x10.1(b~f)针对权重集{ 2, 5, 13, 16, 19, 37 },依次给出 了算法各步迭代之后,两个队列的具体组成。最终构造出的 Huffman 编码树,如图(g)所示。
10-11 斜堆 skew heap
描述:与 AVL 树需要借助 bf 记录类似,左式堆也需要设置 npl 记录。然而在实际应用中,这一点既不自然,也影响代码开发与转换效率。实际上,仿照由 AVL 树引出伸展树的思路,可以在保留左式堆优点的前提下消除 npl 记录,新结构称作斜堆(skew heap)。
具体定义与实现可参考:95-Skew-heap.
10-14 HeapSort 稳定性分析
不是稳定的。 在反复摘除堆顶并将末词条转移至堆顶,然后做下滤的过程中,雷同词条之间的相对次序不再保持,故它们在最终所得排序序列中必然是“随机”排列的。 作为一个实例,不妨仿照教材296页的图10.10,考查对堆: { 5, 4, 1a, 1b, 1c } 的排序。不难验证,最终所得的排序结果为: { 1c, 1a, 1b, 4, 5 }
实际上更糟糕的是,以上“随机性”是堆排序算法固有的不足,难以通过该算法自身的调整予以改进。当然,这一问题也并非不能解决——比如,读者不妨参考习题6-23 中介绍的合成数(composite number)法、习题6-16 的扰动法,消除歧义后再排序。
10-16 利用优先级队列改进 Prim 算法
描述:若能注意到教材 6.11.5 节 Prim 算法中定义的“优先级数”恰好对应于优先级队列中元素的优先级,即可利用本章介绍的优先级队列,改进教材 177 页代码 6.8 所示的 O(n^2)版本。 具体地,可首先花费 O(n)时间,将起点 s 与其余顶点之间的 n - 1 条边组织为一个优先级队列 H。此后的每一步迭代中,叧需 O(logn)时间即可从 H 中取出优先级数最小的边(最短桥),并将对应的顶点转入最小支撑树中。不过,随后为了高效地对 H 中与刚转出顶点相关联的每一条边做松弛优化,需要增加一个 decrease(e)接口,在边 e 优先级数减少后将 H 重新调整成一个堆。
注意,decrease 接口不过是调小优先级后重新做一次下滤。
-
试证明如此改进后 Prim 算法效率为 O ((n+e) logn),非常适用于稀疏图 按照该算法,取出每个顶点需要O(logn)时间,累计O(nlogn)时间。 所有顶点的所有邻接顶点的松弛,在最坏情况下累计需要O(elogn)时间。 两项合计,即得题中结论。
-
这种策略是否适合 Dijkstra 算法? 同样适用,只需改用Diskstra算法的优先级更新规则。 事实上,推而广之,这种改进策略适用于任何基于优先级搜索(PFS)策略的算法。
10.17 利用多叉堆改进 Prim 算法
描述:多叉堆中,每个节点至多拥有 d>=3 个孩子,且优先级不低于任何一个孩子。
- 试证明多叉堆 decrease ()接口的效率可改进至
仿照二叉堆的方式实现多叉堆:
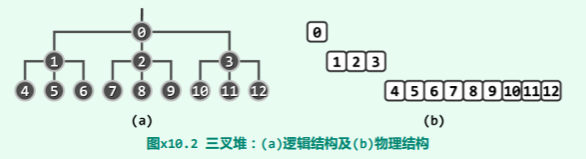 具体地,将所有元素组织为一个向量,且对于任意秩为 k > 0的元素,其父亲对应的秩为: parent(k) =
具体地,将所有元素组织为一个向量,且对于任意秩为 k > 0的元素,其父亲对应的秩为: parent(k) =
比如在图 x10.2所示的三叉堆中,8号元素的父亲对应的秩为:parent(8) = = 2
反过来,对于任意秩为 k < 的元素,其第 i 个孩子(若存在)对应的秩为: child(k, i) = k∙d + i, (i = 1, 2, …, d)
当然,当 d 不再是2的幂时,将不再能够借助移位运算来加速秩的换算。不过反过来,在计算效率并不主要依赖于秩换算效率的场合(比如数据规模大到跨越存储层次,涉及一定量的 I/O 操作时),这种推广完全行之有效。
按照以上实现方式,对于规模为 n 的 d 叉堆而言,高度应为: 如此,在上滤过程中的每一步,只需将当前节点与其父节点做一次比较,因此整个上滤操作 总体的耗时量不过:
与此同时,在下滤过程中的每一步,却需要遍历当前节点及其 d 个孩子,方可确定是否继续下降一层,以及向那个分支下降一层。相应地,总体耗时量为:
- ==试证明,若取 d=e/n+2,则基于 d-heap 实现的 Prim 算法时间复杂度可降低至== 根据以上分析,使用基于 d 叉堆的 Prim 算法,总体时间复杂度应为:
 特别地,当取: d = e/n + 2 时,总体的渐进性能将达到渐进最优的:
特别地,当取: d = e/n + 2 时,总体的渐进性能将达到渐进最优的:
- 这种改进策略是否适用于 Dijkstra 算法? 实际上,在基于优先级搜索(PFS)策略的图算法中,只要各节点优先级的更新方向总是单调非降(相应地,优先级数总是单调非升),则堆结构的上滤、下滤操作必然各自累计需要执行 O(e)次、O(n)次。在通常情况下,前者相对于后者都要更多(甚至非常多),故以上技巧及其性能分析的过程 和结论,亦将完全适用。在 Dijkstra 算法中,各节点优先级的更新方向也是单调非降的,故亦适用以上策略。
10-18 半无穷范围查询与优先级搜索树
描述:所谓半无穷范围查询(semi-infinite range query),是教材 8.4 节中所介绍一般性范围查询的特例。具体地,这里的查询区域是某一侧无界的广义矩形区域,比如 R = [-1, +1] x [0, +∞),即是对称地包含正半 y 坐标轴、宽度为 2 的一个广义矩形区域。当然,对查询的语义功能要求依然不变——从某一相对固定的点集中,找出落在任意指定区域 R 内部的所有点。 范围树(习题[8-20])稍作调整之后,固然也可支持半无穷范围查询,但若能针对这一特定问题所固有的性质,改用优先级搜索树(priority search tree, PST)之类数据结构,则不仅可以保持 O(r + logn)的最优时间效率,而且更重要的是,可以将空间复杂度从范围树的 O(nlogn)优化至 O(n)。
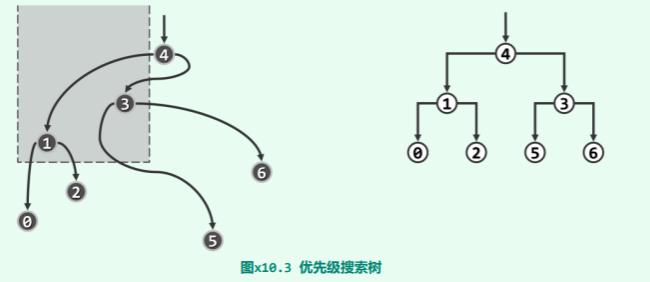 如图 x10.3 所示,优先级搜索树除了首先在拓扑上应是一棵二叉树,还需同时遵守以下三条规则:
如图 x10.3 所示,优先级搜索树除了首先在拓扑上应是一棵二叉树,还需同时遵守以下三条规则:
- 首先,各节点的 y 坐标均不小于其左、右孩子(如果存在)—— 因此,整体上可以视作为以 y 坐标为优先级的二叉堆
- 此外,相对于任一父节点,左子树中节点的 x 坐标均不得大于右子树中的节点
- 最后,互为兄弟的每一对左、右子树,在规模上相差不得超过一
-
试设计算法,在 O (nlogn)时间内将平面上的 n 个点组织成一棵优先级搜索树; 首先,不妨按照 x 坐标对所有的点排序。然后,根据如上定义,可以递归地将这些点组织为一棵优先级搜索树。 具体地,为构造任一点集对应的子树,只需花费 O(n)时间从中找出最高(y 坐标最大)者, 并将其作为子树树根。以下,借助 x 坐标的排序序列,可以在 O(1)时间内将剩余的 n - 1个点均衡地划分为在空间上分列于左、右的两个子集——二者各自对应的子树,可以通过递归构造。 如此,构造全树所需的时间不超过: T(n) = 2∙T(n/2) + O(n) = O(nlogn)
-
试设计算法,利用已创建的优先级搜索树,在 O (r+logn)时间内完成每次半无穷范围查询,其中 r 为实际命中并被报告的点数。
queryPST( PSTNode v, SemiInfRange R ) { //R = [x1, x2] x [y, +∞)
if ( ! v || v.y < R.y ) return; //y-pruning
if ( R.x1 < v.x && v.x < R.x2 ) output(v); //hit
if ( R.x1 < v.xm ) queryPST( v.lc, R ); //recursion & x-pruning
if ( v.xm <= R.x2 ) queryPST( v.rc, R ); //recursion & x-pruning
}
首先,根据 y 坐标,判断当前子树根节点 v(及其后代)是否已经落在查询范围 R 之外。若是,则可立即在此处返回,不再深入递归——亦即纵向剪枝;否则,才需要继续深入查找。
以下,再检查根节点v的x坐标,若落在查询范围之内,则需报告该节点。
最后,若在节点 v 处的横向切分位置为 xm,则通过将其与 R 的左(x1)、右(x2)边界相比较,即可确认是否有必要继续沿对应的子树分支,继续递归搜索——亦即横向剪枝。
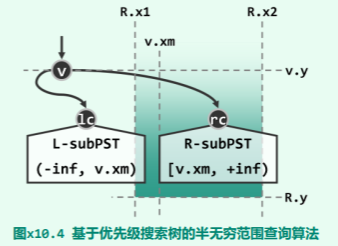
具体地如图 x10.4所示,唯有当 R.x1 位于 v.xm 左侧时,才有必要对左子树 v.lc 做递归搜索;唯有当 R.x2 不位于 v.xm 左侧时,才有必要对右子树 v.rc 做递归搜索。
对于任意的查询区域 R = [x1, x2] x [y, +∞) ,考查被算法 queryPST() 访问的任一节点,设与之对应的点为 v = (a, b)。于是,v 无非三种类型:
- 被访问,且被报告出来——也就是说,v 落在 R 之内(x1 ⇐ a ⇐ x2 且 y ⇐ b)。此类节点恰有 r 个。
- 虽被访问,却未予报告——因其 x 坐标落在 R 之外(a < x1 或 x2 < a)而横向剪枝,不再深入递归。此类节点在每一层上至多只有两个,总数不超过 O (2∙logn)。
- 虽被访问,却未予报告——尽管其 x 坐标落在 R 之内(x1 ⇐ a ⇐ x2),但因其 y 坐标却未落在 R 之内(b < y)而纵向剪枝,也不深入递归。实际上,此类节点的父节点,必然属于 A 或 B 类,其总数不超过这两类节点总数的两倍。
综合以上分析可知,以上 queryPST()算法的渐进时间复杂度不超过 O(r + logn)。
10-19 为栈维护 getMax 接口
要求:保持 Stack::push 和 Stack::pop 等接口复杂度不变,在 O(1) 内定位并读取栈中最大元素。
如图 x10.5所示,对于任何一个栈 S,可以引入另一个与之孪生的“镜像”栈 P。
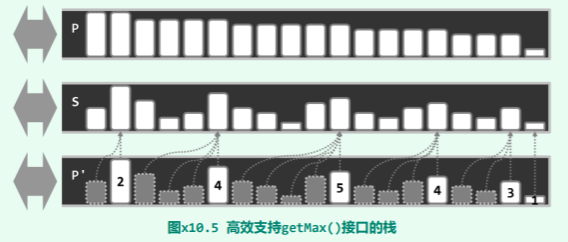 具体地,P 中的元素与 S 中的元素始终保持一一对应,前者的取值,恰好就是后者所有前驱中的最大者。当然,P 中元素因此也必然按照单调非降的次序排列。如此,任何时刻栈 P 的顶元素,都是栈 S 中的最大元素。
具体地,P 中的元素与 S 中的元素始终保持一一对应,前者的取值,恰好就是后者所有前驱中的最大者。当然,P 中元素因此也必然按照单调非降的次序排列。如此,任何时刻栈 P 的顶元素,都是栈 S 中的最大元素。
为保持二者如上的对应关系,它们的 push()和 pop()操作必须同步进行:
- 若执行:
S.pop();则只需同步地执行:P.pop(); - 而若执行:
S.push( e );则需要同步地执行:P.push(max(e,P.top()));
以上方案还可以进一步地优化。 仍如图 x10.5所示,可将栈 P“压缩”为栈 P’。为此,需要注意到,P 中相等的元素必然彼此相邻,并因此可以分为若干组。若假想地令栈 P 中的每个元素通过指针指向栈 S 中对应的元素,而不是保留后者的副本,则可以将 P 中的同组元素合并起来,共享一个指针。当然,同时还需为合并后的元素增设一个计数器,记录原先同组元素的总数。
如此改进之后的“镜像”结构,如图中的栈 P’所示:每一组元素只需保留一份(白色), 其余元素(灰色)则不必继续保存。这样,附加空间的使用量可以大为降低。
- 相应地,在栈 S 每次执行出栈操作时,栈 P(P’)必须同步地执行:
if ( ! ( -- P.top().counter ) ) P.pop(); - 而在栈 S 每次执行入栈操作时,栈 P(P’)也必须同步地执行:
P.top() < e ? P.push( e ), P.top().counter = 1 : P.top().counter ++;
可见,S 的 push()和 pop()接口,依然保持 O(1)的时间效率。
10-20 为队列维护 getMax 接口
要求:保持 Queue::dequeue 接口复杂度不变,Queue::enqueue 接口分摊为 O (1),在 O (1) 内定位并读取队列中最大元素。
习题10-19 针对栈结构的技巧,可以推广至队列结构。比如,可以引入一个双端队列 P 并依然约定,其中每个元素也是始终指向队列 Q 中所有其前驱中的最大者。
为保持二者的对应关系,它们的 dequeue()和 enqueue()操作也必须同步进行:
- 若执行:
Q.dequeue();则只需同步地执行:P.removeFront(); - 而若执行:
Q.enqueue(e);则只需同步地执行:
P.insertRear(e);
for (x = P.rear(); x & (x.key <= e); x = x.pred) //for each rear element x no greater than e
x.key = e; //update its maximum record`
也就是说,除了首先也令 e 加入队列 P,而且还需要将 P 尾部所有不大于 e 的元素,统一更新为 e。 很遗憾,在最坏情况下这需要 Ω(n)时间。而且更糟糕的是,这种情况可能持续发生(读者不妨独立构造出这样的一个实例)。造成这一困难的原因在于,队列中任一元素的前驱集,不再如在栈中那样是固定的,而是可能增加、甚至新增的元素非常大。为此,可按照如图 x10.6 所示的思路进一步改进。
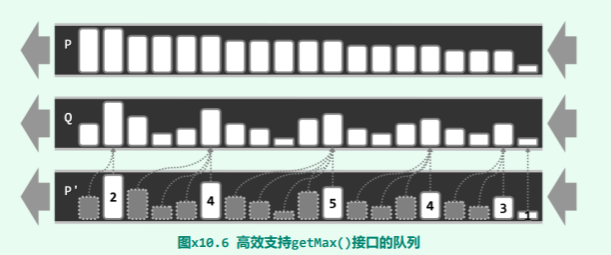 具体地,可首先仿照 习题10-19 的改进技巧,通过合并相邻的同组元素,将队列 P 压缩为 队列 P’。然后,
具体地,可首先仿照 习题10-19 的改进技巧,通过合并相邻的同组元素,将队列 P 压缩为 队列 P’。然后,
- 在队列 Q 每次执行出队操作时,队列 P(P’)必须同步地执行:
if (!(-- P.front().counter)) P.removeFront(); - 而在队列 Q 每次执行入队操作时,栈 P(P’)也必须同步地执行:
a = 1; //counter accumulator
while (!P.empty() && (P.rear().key <= e) //while the rear element is no greater than e
a += P.removeRear().counter; //accumulate its counter before removing it
P.insertRear(e);
P.rear().counter = a;
这里的 while 循环,在最坏情况下仍然需要迭代 O(n)步,但因为参与迭代的元素必然随即被删除,故就分摊意义而言仅为 O(1)步,时间性能大为改善。
另外,这里的队列 P’并不需要具备双端队列的所有功能。实际上,它仅使用了 Deque 结构的 removeFront()、insertRear()和 removeRear()接口,而无需使用 insertFront()接口 —— 因此形象地说,它只不过是一个“1.5”端队列。
10-21 合并 AVL 树
说明:任给高度为 g 和 h 的两棵 AVL 树 S 和 T,其中 S 的节点均不大于 T 的节点。试设计算法,在 O (max (g, h))时间内合并为一棵 AVL 树。
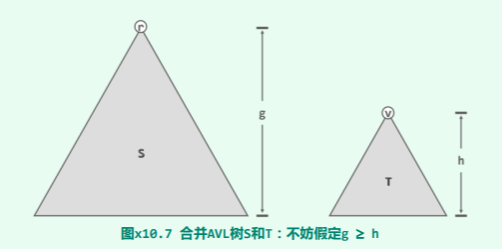 首先如图 x10.7所示,不失一般性地,假定 S 的高度不低于 T——否则,以下算法完全对称。
首先如图 x10.7所示,不失一般性地,假定 S 的高度不低于 T——否则,以下算法完全对称。
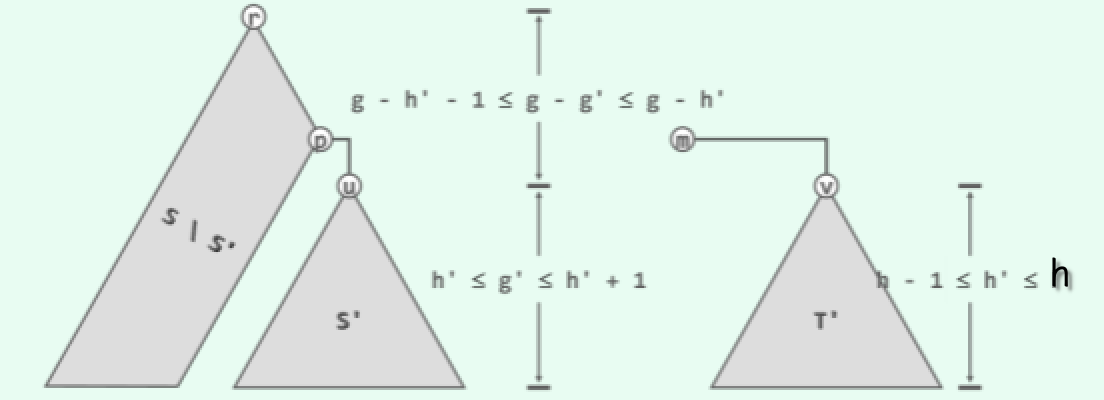 设 m 为 T 中的最小节点。若将 m 从 T 中摘出,则如图 x10.8 所示,新得到的 AVL 树 T’的高度 h’必然不致增加,而且至多降低一层。 根据 AVL 树的定义,这里沿着起自根节点的任一通路每下降一层,节点的高度虽必然降低,但至多降低2。因此如图 x10.8 所示,沿着树 S 的最右侧通路,必然可以找到某个节点 u,其高度不低于 h',而且至多比 T'高一层。将子树 u 记作 S’。
设 m 为 T 中的最小节点。若将 m 从 T 中摘出,则如图 x10.8 所示,新得到的 AVL 树 T’的高度 h’必然不致增加,而且至多降低一层。 根据 AVL 树的定义,这里沿着起自根节点的任一通路每下降一层,节点的高度虽必然降低,但至多降低2。因此如图 x10.8 所示,沿着树 S 的最右侧通路,必然可以找到某个节点 u,其高度不低于 h',而且至多比 T'高一层。将子树 u 记作 S’。
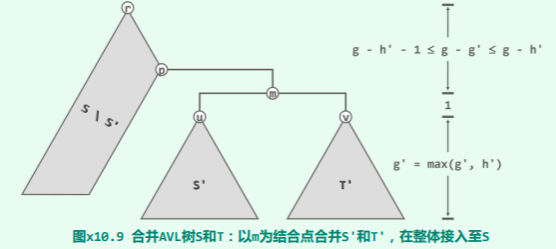 于是接下来如图 x10.9所示,只要以节点 m 为联接点,将 S’和 T’分别作为其左、右子树,即可拼接成为一棵 AVL 树。
于是接下来如图 x10.9所示,只要以节点 m 为联接点,将 S’和 T’分别作为其左、右子树,即可拼接成为一棵 AVL 树。
以下,将该AVL树作为节点p的右子树接入树S中,则只有p及其祖先可能失衡。因此,只需从p出发上溯并逐层核对平衡性,则至多在一个节点处经两次旋转,即可使全树恢复平衡。。
再计入删除节点 m 所需的 O(h)时间,以及查找节点 u 所需的 O(g - h)时间,可见以上算法的总体时间复杂度为 O(g) = O(max(g, h))。
特别地,若节点 m 已经从 T 中摘出,且节点 u 已知,则以上算法只需 O(g - h)时间,线性正比于两棵待合并树的高度之差。对于以下的 习题10-22,这一性质将至关重要。
10-22 分裂 AVL 树
说明:任给高度为 h 的一棵 AVL 树 A,以及一个关键码 e,试设计一个算法,在 O(h)时间内将 A 分裂为一对 AVL 树 S 和 T,且 S 中节点均小于 e,而 T 中的节点均不小于 e。
以关键码 e 查找路径上的各节点为界,可以按照中序遍历次序将全树 A 划分为一系列的子树。以如图 x10.10所示的树 A 为例,
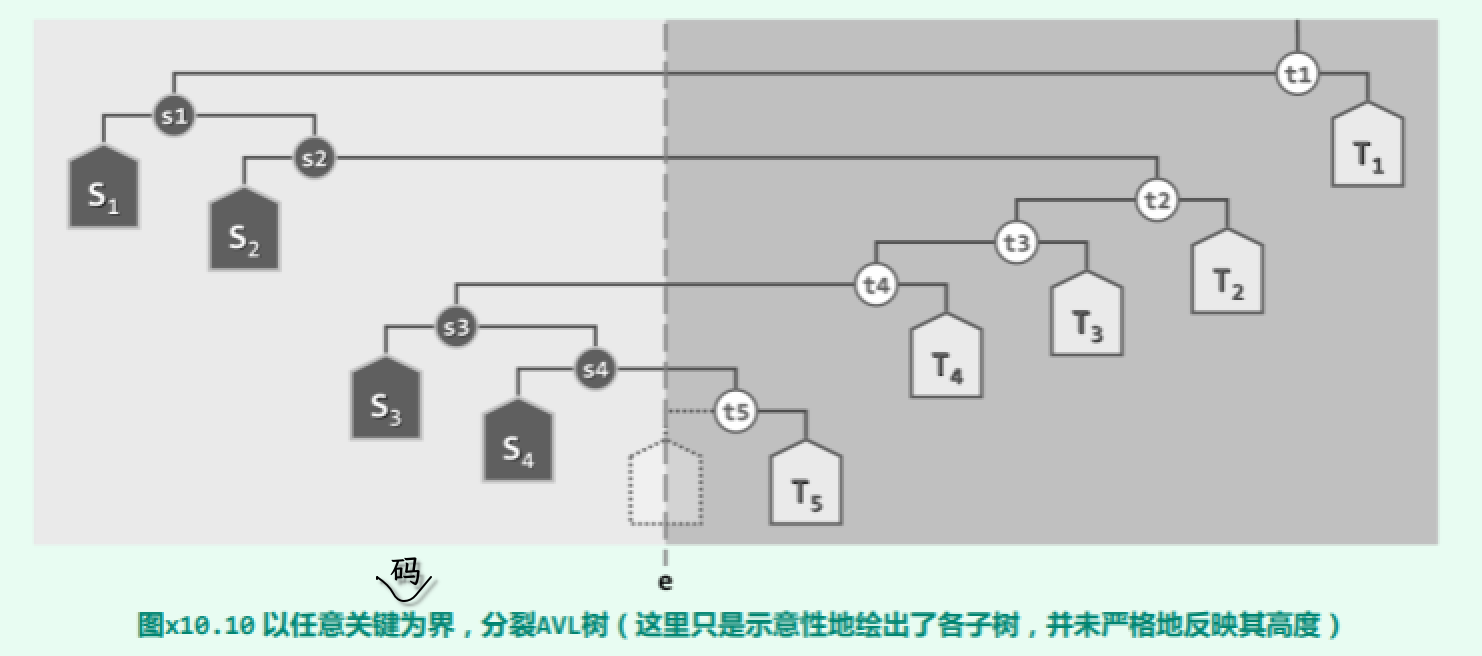
若 e 的查找路径为: t1, s1, s2, t2, t3, t4, s3, s4, t5, …
则相应地划分出来的子树依次是: T1, S1, S2, T2, T3, T4, S3, S4, T5, …
不难看出,全树的中序遍历序列应是: S1, s1; S2, s2; S3, s3; S4, s4; …; t5, T5; t4, T4; t3, T3; t2, T2; t1, T1
而分裂出的两棵 AVL 子树的中序遍历序列,则应该分别是: S = S1, s1; S2, s2; S3, s3; S4, s4; … T = …; t5, T5; t4, T4; t3, T3; t2, T2; t1, T1
因此,我们可以自底而上,通过反复的合并构造出 S 和 T。鉴于这两棵树完全对称,这里不妨仅以树 T 为例,介绍具体的合并过程:
- 一旦以 t5 为根的 AVL 子树已经构造出来,我们即可以节点 t4 为联接点,将其与 AVL 子树 T4 合并,得到一棵更大的 AVL 树;
- 接下来,再以节点 t3 为联接点,进一步地将其与 AVL 子树 T3 合并;
- 然后,再以节点 t2 为联接点,继续将新得到的 AVL 树与树 T2 合并;
- 最后,以节点 t1 为联接点,将新得到 的 AVL 树与树 T1 合并。
如此,最终即可得到所求的 AVL 树 T。 这里涉及的 AVL 树合并计算,属于 习题10-21 所指出的特殊情况:作为联接点的节点 tk, 均等效于已经从待合并子树中摘出,且接入位置已知。因此每次合并所需的时间,不超过被合并子树的高度之差。考虑到前后项的依次抵消效果,累计时间应渐进地不超过原树高度 O(h)。