拓扑排序
DAG
有向无环图:Directed Acyclic Graph
- 应用:
- 类派生和继承关系图中,是否存在循环定义
- 操作系统中相互等待的一组线程,如何调度
- 给定一组相互依赖的课程,设计可行的培养方案
- 给定一组相互依赖的知识点,设计可行的教学进度方案
- 项目工程图中,设计可串行施工的方案
- email 系统中,是否存在自动转发或回复的回路…
拓扑排序的要求
- 任给有向图 G(不一定是 DAG),尝试将所有顶点排成一个线性序列,使其次序须与原图相容(意即,每一顶点都不会通过边指向前驱顶点)

- 接口要求:
- 若原图存在回路(即并非 DAG),检查并报告
- 否则,给出一个相容的线性序列
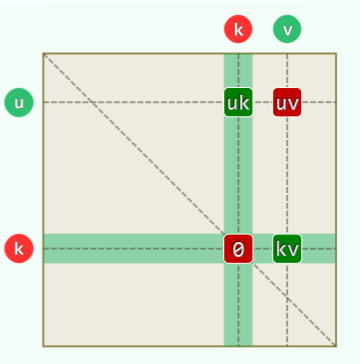
DAG 中的偏序关系
-
每个 DAG 对应于一个偏序集,而拓扑排序对应于一个全序集,拓扑排序的过程就是构造一个与指定偏序集相容的全序集。
-
可以拓扑排序的有向图必定无环,反之亦然,DAG 才能做拓扑排序得到线性序列,而且拓扑排序的结果至少一种。
-
有限的偏序集一定会有极值元素,由此归纳证明可以得到拓扑排序的算法。
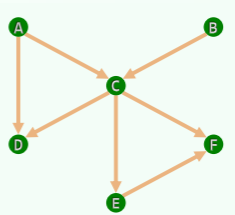
零入度
思路
在任何 DAG 中,必有一个零入度的顶点 m,若该 DAG 除去 m 点可以得到一个拓扑排序 S={},则 S’={}即为该 DAG 的拓扑排序。如此递归下去即可完全排序。
需要注意的是:
- DAG 的子图亦为 DAG
- 只要 m 不唯一,则拓扑排序的结果也不唯一
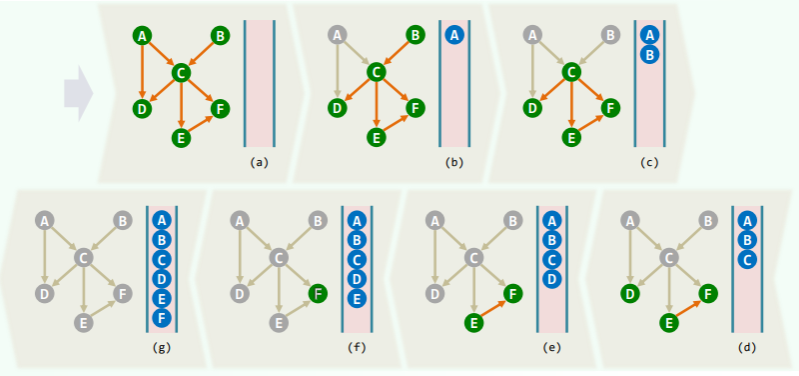
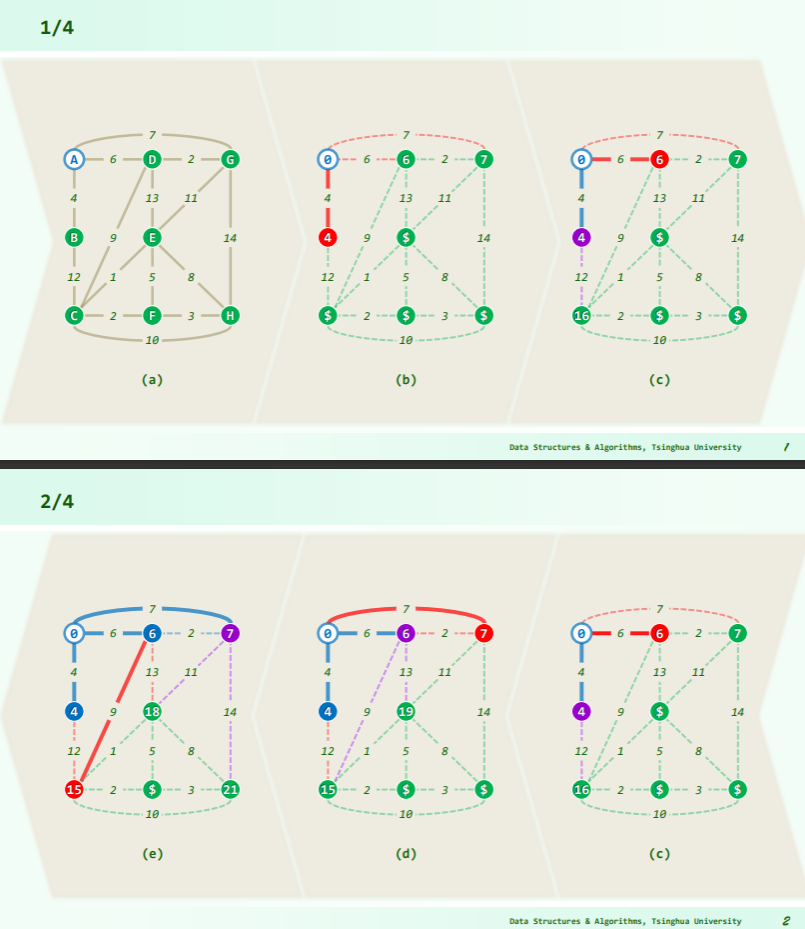
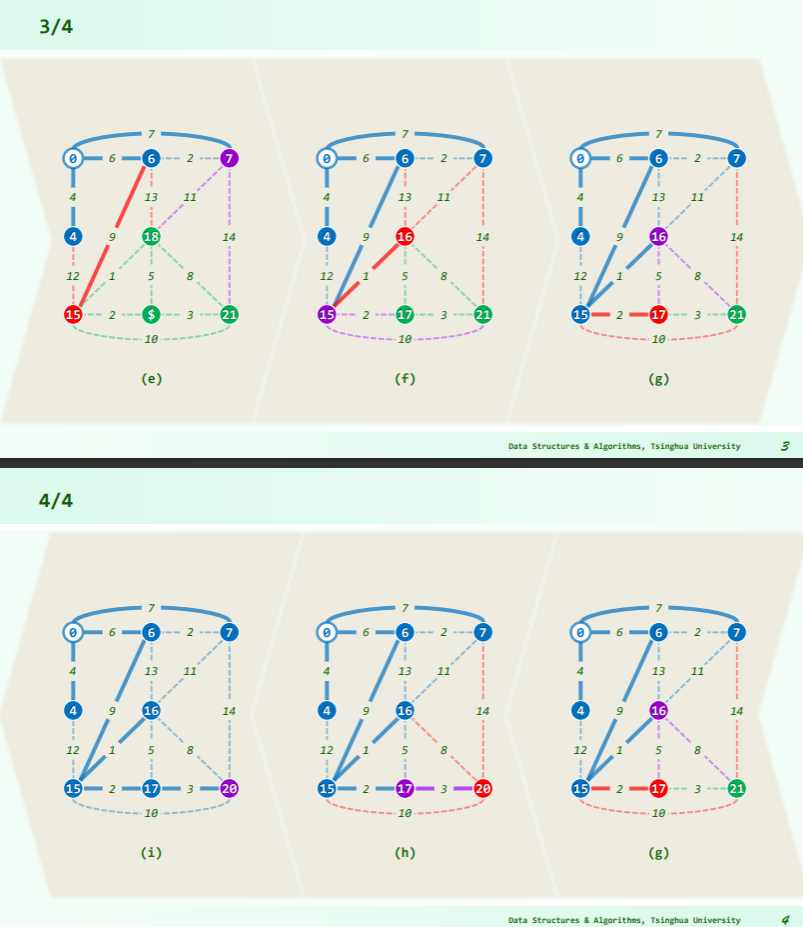
策略(伪代码)
-
将所有入度为 0 的顶点存入栈 S,取空队列 Q //O (n)
-
从栈中输出所有零入度的顶点,最后得到的序列是顺序的零入度顶点:
while ( ! S.empty() ) { //O(n)
Q.enqueue( v = S.pop() ); //栈顶v转入队列
for each edge( v, u ) //v的邻接顶点u若入度仅为1
if ( u.inDegree < 2 ) S.push( u ); //则入栈
G = G \ { v }; //删除v及其关联边(邻接顶点入度减1)
} //总体O(n + e)
return |G| ? "NOT_A_DAG" : Q; //残留的G空,当且仅当原图可拓扑排序
实例
零出度
思路
相对应地,可以从 DAG 的零出度顶点逆向出发,递归地输出所有 DAG 及其子图的零出度顶点。
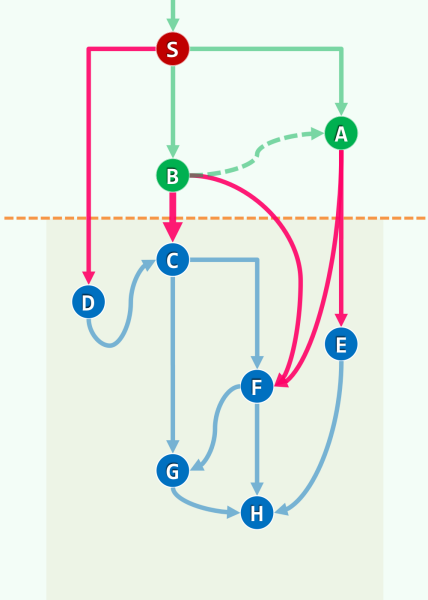
策略(描述)
- 基于 DFS,借助栈 S,对图 G 做 DFS,得到组成 DFS 森林的一系列 DFS 树
- 其间每当有顶点被标记为 VISITED,则将其压入 S,一旦发现有后向边,则报告“NOT_A_DAG”并退出 (出现了环,不再是 DAG)
- DFS 结束后,顺序弹出 S 中的各个顶点
各节点按 fTime 逆序排列,即是(零出度)拓扑排序 //因为 ftime 代表对一个顶点的访问结束,其在当前子图中不再有出度。
整体算法的复杂度与 DFS 相当,也是 O (n+e)
实例

代码
//基于DFS的拓扑排序算法(全图)
template <typename Tv, typename Te>
Stack<Tv>* Graph<Tv, Te>::tSort( Rank s ) { // assert: 0 <= s < n
reset(); Rank clock = 0; //全图复位
Stack<Tv>* S = new Stack<Tv>; //用栈记录排序顶点
for ( Rank v = s; v < s + n; v++ ) //从s起顺次检查所有顶点
if ( UNDISCOVERED == status( v % n ) ) //一旦遇到尚未发现者
if ( !TSort( v, clock, S ) ) { //即从它出发启动一次TSort
while ( !S->empty() ) //任一连通域(亦即整图)非DAG
S->pop();
break; //则不必继续计算,故直接返回
}
return S; //若输入为DAG,则S内各顶点自顶向底排序;否则(不存在拓扑排序),S空
} //如此可完整覆盖全图,且总体复杂度依然保持为O(n+e)
//基于DFS的拓扑排序算法(单连通图)
template <typename Tv, typename Te>
bool Graph<Tv, Te>::TSort( Rank v, Rank& clock, Stack<Tv>* S ) { // v < n
dTime( v ) = ++clock; status( v ) = DISCOVERED; //发现顶点v
for ( Rank u = firstNbr( v ); - 1 != u; u = nextNbr( v, u ) ) //枚举v的所有邻居u
switch ( status( u ) ) { //并视u的状态分别处理
case UNDISCOVERED :
parent( u ) = v; type( v, u ) = TREE;
if ( !TSort( u, clock, S ) ) //从顶点u处出发深入搜索
return false; //若u及其后代不能拓扑排序(则全图亦必如此),故返回并报告
break;
case DISCOVERED :
type( v, u ) = BACKWARD; //一旦发现后向边(非DAG),则
return false; //不必深入,故返回并报告
default : // VISITED (digraphs only)
type( v, u ) = ( dTime( v ) < dTime( u ) ) ? FORWARD : CROSS;
break;
}
status( v ) = VISITED; S->push( vertex( v ) ); //顶点被标记为VISITED时,随即入栈
return true; // v及其后代可以拓扑排序
}
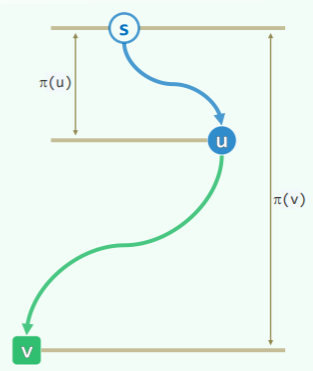
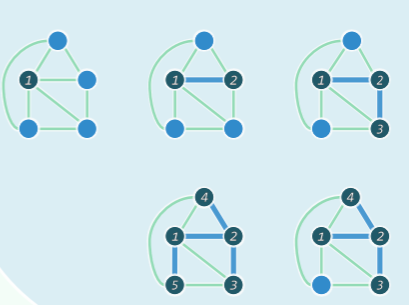
双连通分量
判定
定义
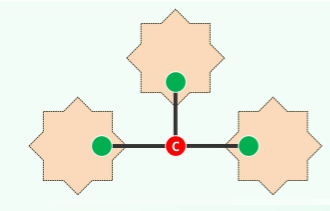
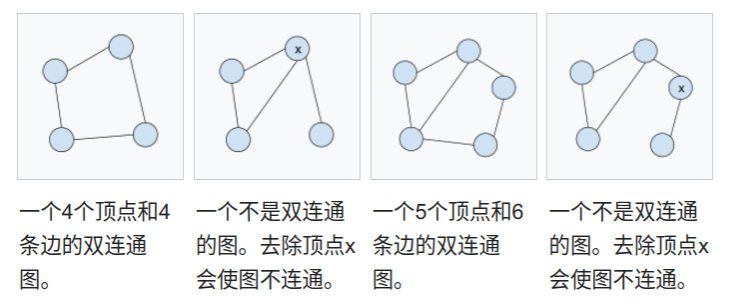
- 无向图的关节点 (articulation point, cut-vertex):其删除之后,原图的连通分量增多
- 无关节点的图,称作双(重)连通图 (bi-connectivity):任何一个顶点被去除,图仍是连通的
- 极大的双连通子图,称作双连通分量 (Bi-Connected Components, BCC)
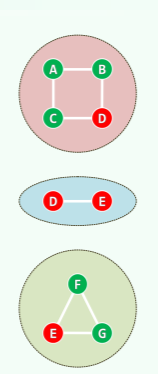
暴力法
确定一个无向图的各 BCC,如果使用暴力法,则逐个拆除关节点:
- 对每一顶点 v,通过遍历检查
G\{v}是否仍连通; - 这一方法需要 O (n*(n+e)的时间,并且找出关节点后仍需遍历重新确定 BCC
改进:利用 DFS
构造 DFS 树,根据 DFS 留下的标记,甄别是否是关节点:
- 叶节点绝不是关节点——删除后对全树(图)的连通性没有影响;
- 考查非叶节点,若其是关节点,则必须有如下条件:
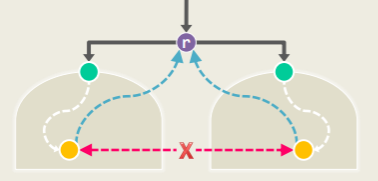
- 对根 r,其必须有至少 2 棵子树:
- 对内部节点 v,其有某个孩子 u,u 的子树不能经由 BACKWARD 边连接到 v 的任何真祖先 a(即取掉 v 也能通过 BACKWARD 连回到a):
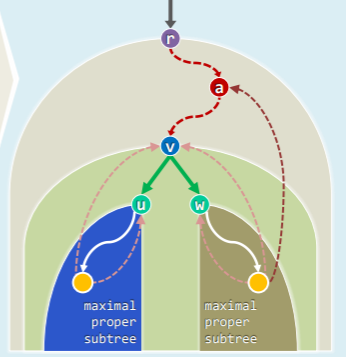
- 此时{v}=
- 记最高可达祖先 hca(v) ,表示 subtree (v)中节点经 BACKWARD 可达的最高祖先:
- 由括号引理,可以知道 dTime 越小的祖先,辈分越高,其中 dTime=0 的祖先为根节点
- 在 DFS 过程中,一旦发现<v, u>是 BACKWARD,则取 hca (v)=min (hac (v), dTime (u))
- 当 DFS (u)完成并返回到 v 时,若有 hca (u)<dTime (v),则取 hca (v)=min (hca (v), hca (u))
- 否则即可断定 v 是关节点,且{v}+subtree (u)即为一个 BCC
- 对根 r,其必须有至少 2 棵子树:
代码
//基于DFS的BCC分解算法(全图)
template <typename Tv, typename Te>
void Graph<Tv, Te>::bcc( Rank s ) {
reset(); Rank clock = 0; Rank v = s;
Stack<Rank> S; //栈S用以记录已访问的顶点
do
if ( UNDISCOVERED == status( v ) ) { //一旦发现未发现的顶点(新连通分量)
BCC( v, clock, S ); //即从该顶点出发启动一次BCC
S.pop(); //遍历返回后,弹出栈中最后一个顶点――当前连通域的起点
}
while ( s != ( v = ( ++v % n ) ) );
}
#define hca(x) (fTime(x)) //利用此处闲置的fTime[]充当hca[]
template <typename Tv, typename Te> //顶点类型、边类型
void Graph<Tv, Te>::BCC( Rank v, Rank& clock, Stack<Rank>& S ) { // assert: 0 <= v < n
hca( v ) = dTime( v ) = ++clock;
status( v ) = DISCOVERED;
S.push( v ); // v被发现并入栈
for ( int u = firstNbr( v ); - 1 != u; u = nextNbr( v, u ) ) //枚举v的所有邻居u
switch ( status( u ) ) { //并视u的状态分别处理
case UNDISCOVERED:
parent( u ) = v; type( v, u ) = TREE;
BCC( u, clock, S ); //从顶点u处深入
if ( hca( u ) < dTime( v ) ) //遍历返回后,若发现u(通过后向边)可指向v的真祖先
hca( v ) = min( hca( v ), hca( u ) ); //则v亦必如此
else //否则,以v为关节点(u以下即是一个BCC,且其中顶点此时正集中于栈S的顶部)
while ( u != S.pop() ); //弹出当前BCC中(除v外)的所有节点,可视需要做进一步处理
break;
case DISCOVERED:
type( v, u ) = BACKWARD; //标记(v, u),并按照“越小越高”的准则
if ( u != parent( v ) )
hca( v ) = min( hca( v ), dTime( u ) ); //更新hca[v],越小越高
break;
default: //VISITED (digraphs only)
type( v, u ) = ( dTime( v ) < dTime( u ) ) ? FORWARD : CROSS;
break;
}
status( v ) = VISITED; //对v的访问结束
}
#undef hca
复杂度
- 运行时间与常规的 DFS 相同,也是 O (n + e) ,栈操作的复杂度也不过如此
- 除原图本身,还需一个容量为 O (e)的栈存放已访问的边
- 为支持递归,另需一个容量为 O (n)的运行栈
如何推广至有向图的强连通分量 (Strongly-connected component)?
- Kosaraju’s algorithm
- Tarjan’s algorithm
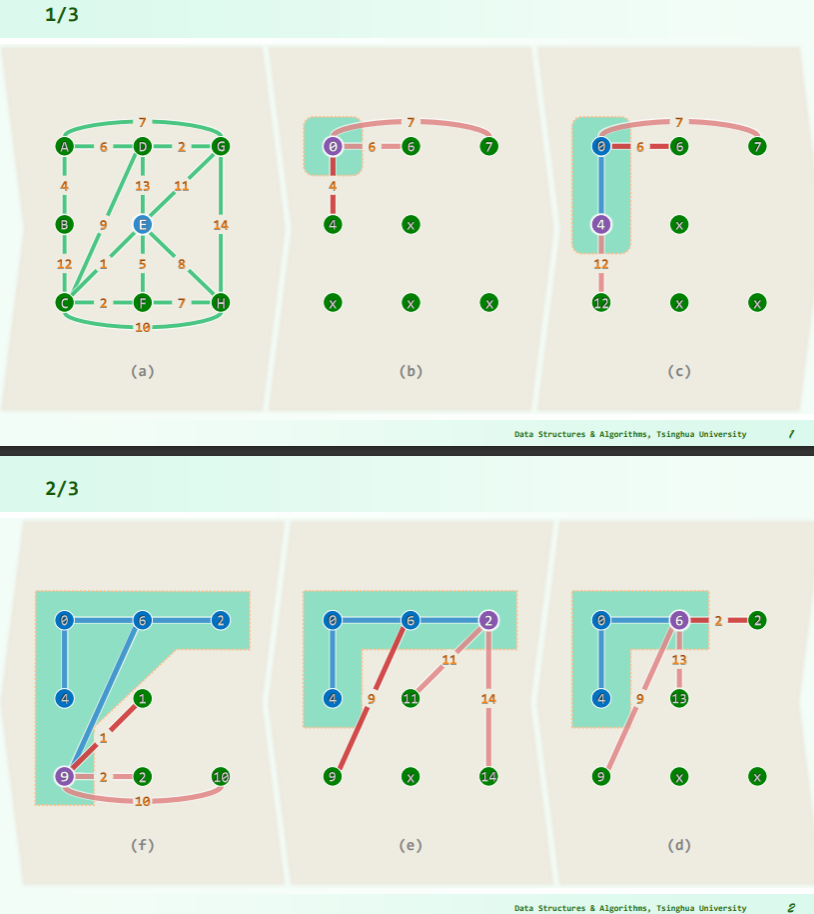
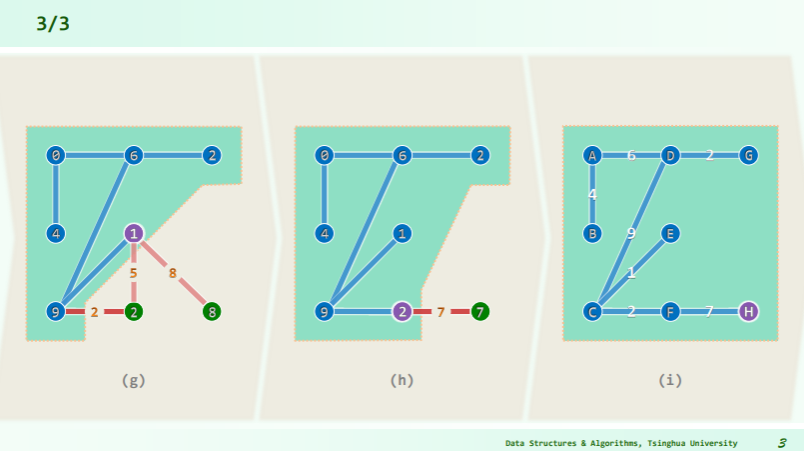
实例
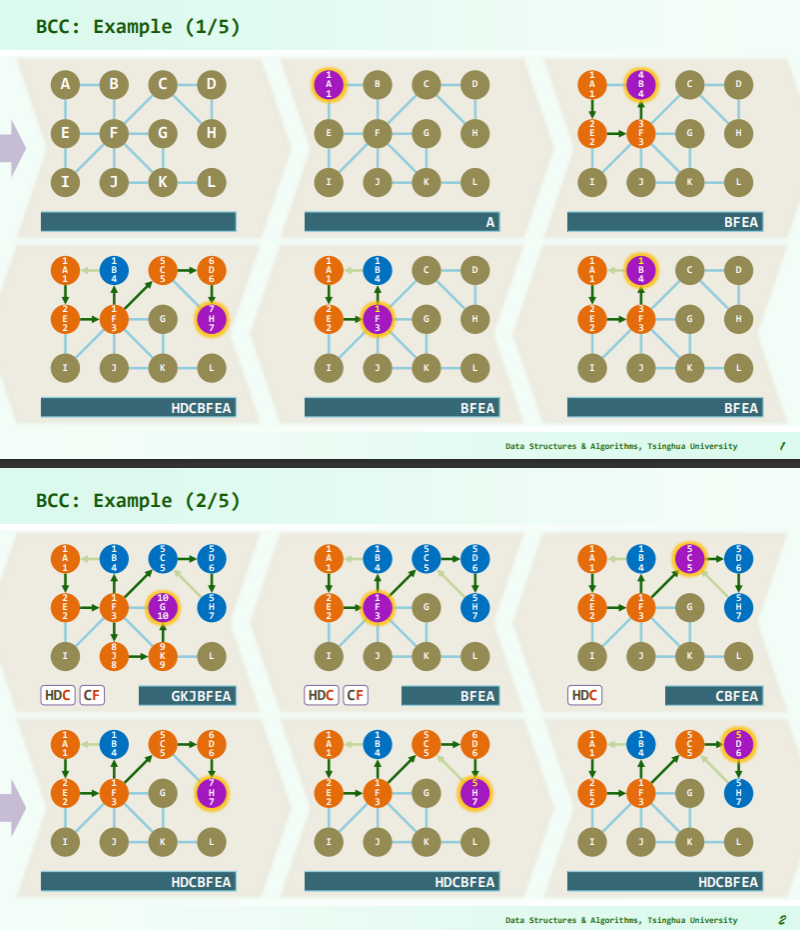
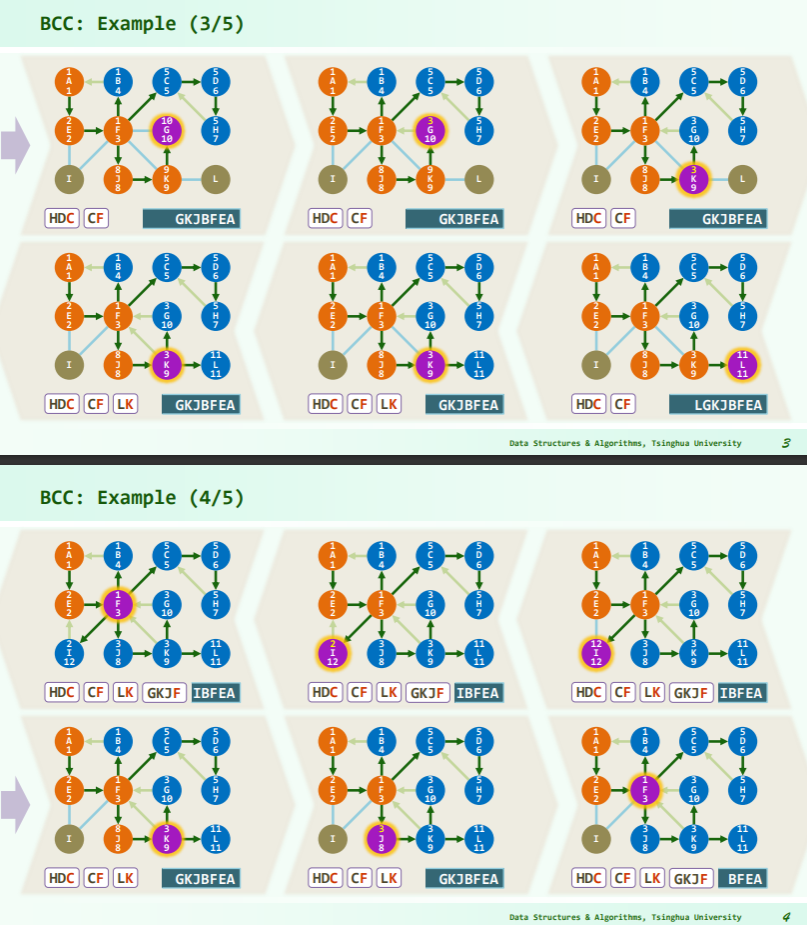
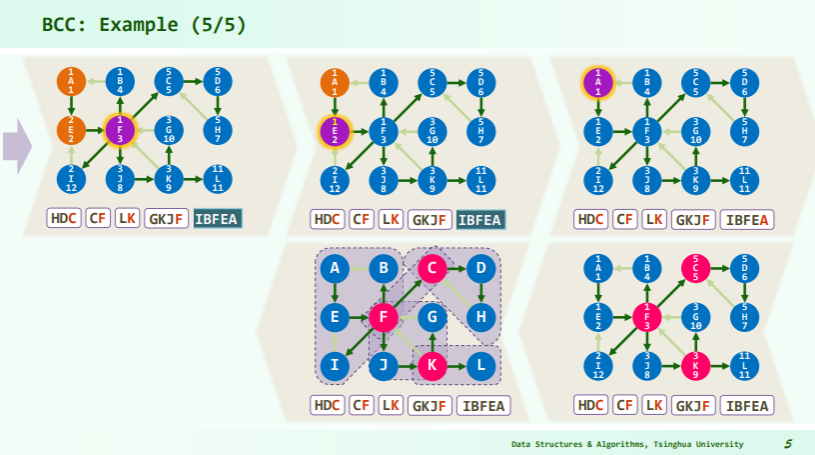
[! note] 如何判断根节点是否为关节点? 这个实例在最后一步判断出发节点 A 是否为关节点时,先将 A 当作关节点处理,再又祛除。但是在代码中不能排除 dfs 根不是关节点的情况,因为算法是 dtime>=hca,就会被认成关节点,而不会有 hca 小于根节点的 dtime。
一种比较好的解决思路是:统计根节点的出度——根节点出度为 1 时,必然不会是关节点,而出度为 2 时又必然是关机点。
优先级搜索
各种遍历算法的区别,仅在于选取顶点进行访问的次序:
-
广度/深度:优先访问与更早/更晚被发现的顶点相邻接者;
-
不同的遍历算法,取决于顶点的选取策略,不同的顶点选取策略,取决于存放和提供顶点的数据结构
-
PFS 的思想就是为每个顶点 v 维护一个优先级数 priority (v),每次选取访问的节点依据于 priority:
- 每个顶点都有初始优先级数,并可能随算法的推进而调整
- 通常的习惯是,优先级数越大/小,优先级越低/高, 特别地,priority (v) == INT_MAX,意味着 v 的优先级最低
由此 PFS 可以作为一个算法框架,容纳很多对图的不同遍历需求。
算法框架
template <typename Tv, typename Te>
template <typename PU> //优先级搜索(全图)
void Graph<Tv, Te>::pfs( Rank s, PU prioUpdater ) { // s < n
reset(); //全图复位
for ( Rank v = s; v < s + n; v++ ) //从s起顺次检查所有顶点
if ( UNDISCOVERED == status( v % n ) ) //一旦遇到尚未发现者
PFS( v % n, prioUpdater ); //即从它出发启动一次PFS
} //如此可完整覆盖全图,且总体复杂度依然保持为O(n+e)
template <typename Tv, typename Te>
template <typename PU> //顶点类型、边类型、优先级更新器
void Graph<Tv, Te>::PFS( Rank v, PU prioUpdater ) { //优先级搜索(单个连通域)
priority( v ) = 0;
status( v ) = VISITED; //初始化,起点v加至PFS树中
while ( 1 ) { //将下一顶点和边加至PFS树中
for ( Rank u = firstNbr( v ); - 1 != u; u = nextNbr( v, u ) ) //对v的每一个邻居u
prioUpdater( this, v, u ); //更新其优先级及其父亲
int shortest = INT_MAX;
for ( Rank u = 0; u < n; u++ ) //从尚未加入遍历树的顶点中,选出下一个优先级
if ( ( UNDISCOVERED == status( u ) ) && ( shortest > priority( u ) ) ) //最高的
{ shortest = priority( u ), v = u; } //顶点v
if ( shortest == INT_MAX ) break; //直至所有顶点均已加入
status( v ) = VISITED; type( parent( v ), v ) = TREE; //将v加入遍历树
}//while
} //通过定义具体的优先级更新策略prioUpdater,即可实现不同的算法功能
复杂度
-
执行时间主要消耗于内、外两重循环;其中两个内循环前、后并列
- 前一内循环的累计执行时间:若采用邻接矩阵,为 O (n^2);若采用邻接表,为 O (n+e)
- 后一循环中,优先级更新的次数呈算术级数变化{ n, n - 1, …, 2, 1 },累计为 O (n^2) ,两项合计,为 O (n^2)
-
后面可以改进:若采用优先级队列,以上两项将分别是 O (elogn)和 O (nlogn) ,两项合计,为 O ((e+n) logn)
- 这是很大的改进——尽管对于稠密图而言,反而是倒退 //已有接近于 O (e + nlogn)的算法
- 基于这个统一框架,可以解决一系列应用问题。
Dijkstra 算法求最短路径
问题描述
在给定有向连通图 G 及其中顶点 u 和 v,如何找到从 u 到 v 的最短路径?
这个问题应用广泛:
- 旅游者:最经济的出行路线
- 路由器:最快地将数据包传送到目标位置
- 路径规划:多边形区域内的自主机器人
按照图的类型,可以划分为无权图、带权有向图(目前讨论的权值为非负,实际上负权值可以给每个权都加一个正数,使其非负再做讨论,最后减去这个整数就好):
- Dijkstra 于 1959 年给出算法 SSSP (Single-Source Shortest Path):给定顶点 s,计算 s 到其余各个顶点的最短路径及长度;
- Floyd-Warshall 于 1962 年给出 APSP (All-Pairs Shortest Path):找出每对顶点 v 和 u 之间的最短路径及长度。
最短路径树
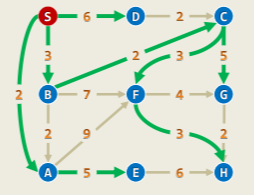
对于两点间最短路径问题,可以确定:任一最短路径的前缀,也必然是最短路径。如下图,将<s, v>的最短路径记作 ,则有:
另外,在以 Dijkstra 方法构建最短路径树之前,需要明确:
- 各边权重均为正,否则有可能出现总权重非正的环路,以致最短路径无从定义
- 有负权重的边时,即便所有环路总权重皆为正,Dijkstra 算法依然可能失效
- 任意两点之间,最短路径唯一,在不影响计算结果的前提下,总可通过适当扰动予以保证(习题 6-17)
最短路径树 SPT:是所有最短路径的并集,并且继承了树的性质——极小连通图,最大无环图:
- 构成的一棵树
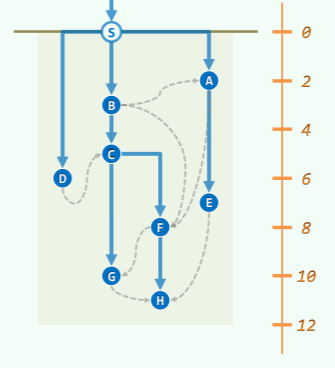
算法
思路:减治,每一次遍历都减小一次搜索范围:
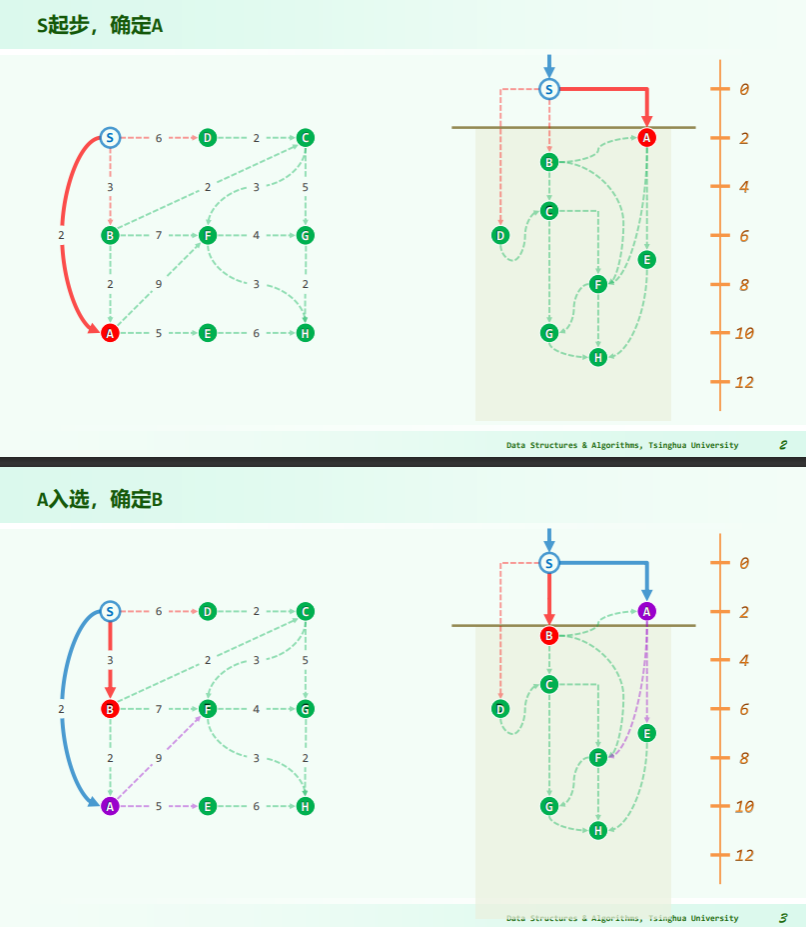
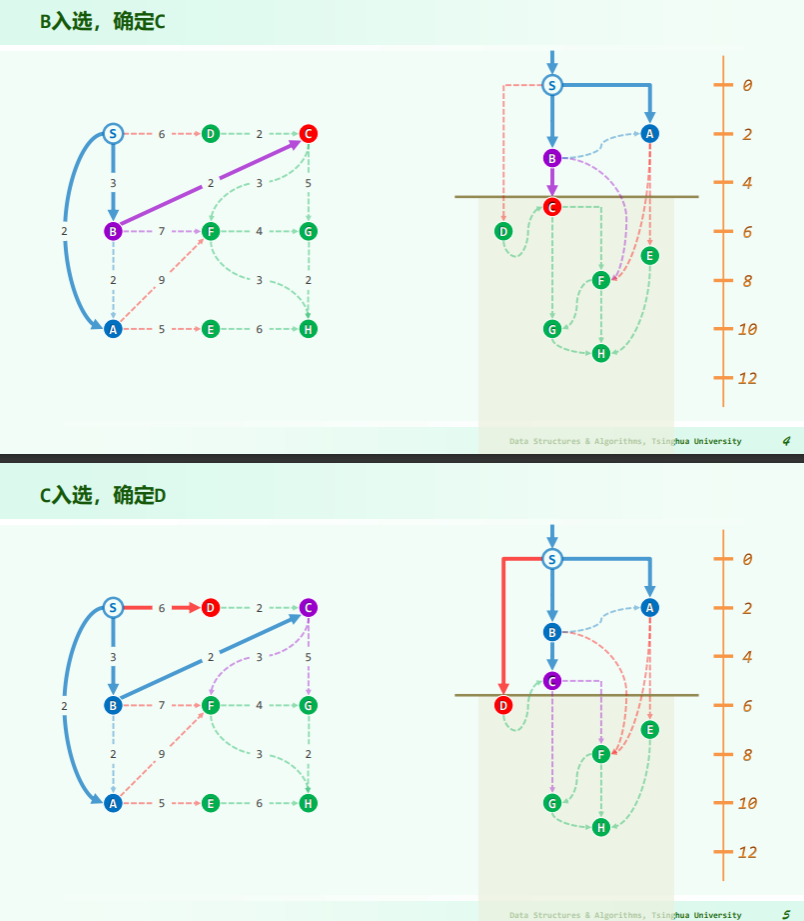
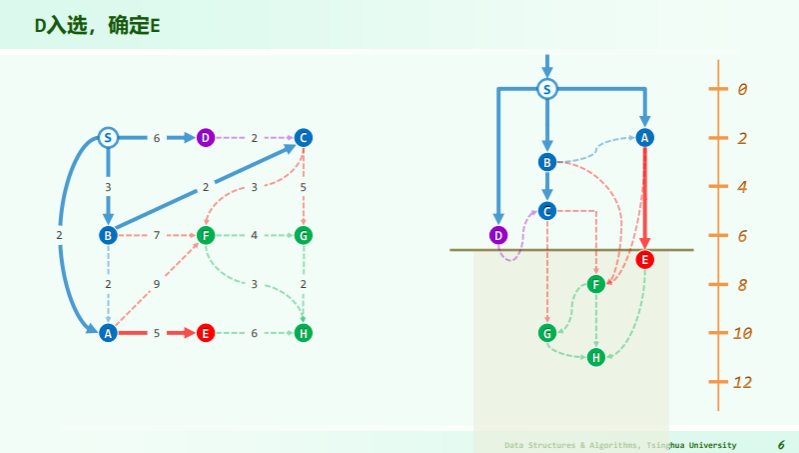
实例
实现
- 在图 G 及其子图中,每一轮都为可在一条路径到达的节点标记优先级 priority,其值决定于已确定范围到目标点的距离;
- 套用 PFS 框架,每一轮 SPT 的增长: ,
- 只需要选出优先级最高的跨边 CROSS及其对应顶点 ,
- 将其接入 即可,随后再更新 中所有顶点的优先级;
- 只需要选出优先级最高的跨边 CROSS及其对应顶点 ,
- 需要注意,优先级随后可能改变(降低)的顶点,必定与 邻接;
- 因此只需枚举 的每一邻接顶点 ,并取
因此对应于 Dijkstra 的优先级更新器如下:
//针对Dijkstra算法的顶点优先级更新器
template <typename Tv, typename Te> struct DijkPU {
virtual void operator()( Graph<Tv, Te>* g, Rank v, Rank u ) {
if ( UNDISCOVERED == g->status( u ) ) //对于v每一尚未被发现的邻接顶点u,按Dijkstra策略
if ( g->priority( u ) > g->priority( v ) + g->weight( v, u ) ) { //做松弛
g->priority( u ) = g->priority( v ) + g->weight( v, u ); //更新优先级(数)
g->parent( u ) = v; //并同时更新父节点
}
}
};
整体 Dijkstra 算法如下:
//最短路径Dijkstra算法:适用于一般的有向图
template <typename Tv, typename Te>
void Graph<Tv, Te>::dijkstra( Rank s ) { // s < n
reset(); priority( s ) = 0;
for ( Rank i = 0; i < n; i++ ) { //共需引入n个顶点和n-1条边
status( s ) = VISITED;
if ( -1 != parent( s ) ) type( parent( s ), s ) = TREE; //引入当前的s
for ( Rank j = firstNbr( s ); - 1 != j; j = nextNbr( s, j ) ) //枚举s的所有邻居j
if ( ( status( j ) == UNDISCOVERED ) && ( priority( j ) > priority( s ) + weight( s, j ) ) ) //对邻接顶点j做松弛
{ priority( j ) = priority( s ) + weight( s, j ); parent( j ) = s; } //与Prim算法唯一的不同之处
int shortest = INT_MAX;
for ( Rank j = 0; j < n; j++ ) //选出下一最近顶点
if ( ( status( j ) == UNDISCOVERED ) && ( shortest > priority( j ) ) )
{ shortest = priority( j ); s = j; }
}
} //对于无向连通图,假设每一条边表示为方向互逆、权重相等的一对边
Prim 算法求 MST
MST 是什么
-
支撑:对连通网络 N=(V; E)的子图 T=(V; F),所谓支撑指的是覆盖 N 中所有可达顶点。树即可做到——连通且无环,并且树边数|F| = |V|-1;
-
最小:总权重 达到最小
- MST 的优势应用:众多优化问题的基本模型,为许多 NP 问题提供足够好的近似解
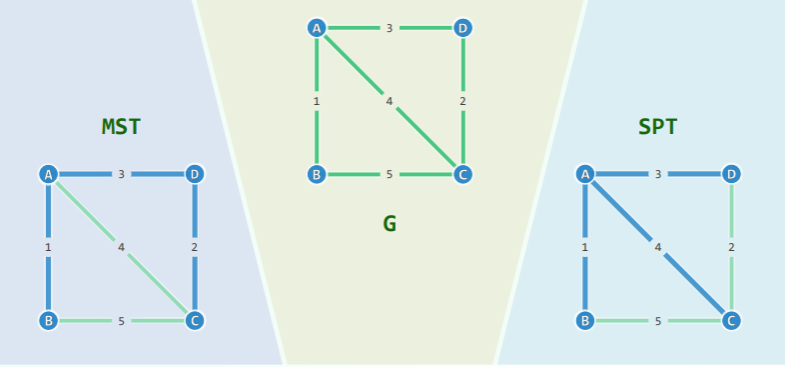
MST != SPT
- MST:针对子图总距离最短
- SPT:针对所求点距离最短
在考虑 MST 之前,需要确定:
- 权值必须是正数?
- 允许为零,有何影响?
- 允许为负数呢?
- 支撑树虽然可以有很多种,但所含的边数必然是相同的:|V|-1
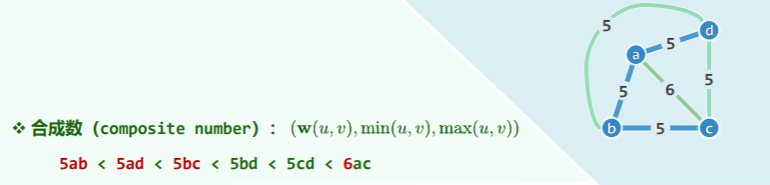
- 存在权重相同的边的图中,构造的 MST 可能有多种,为了消除歧义,可以考虑对节点的信息也加入权重考量中:
蛮力算法
- 枚举出 N 的所有支撑树,再逐个计算代价
- 但是包含 n 个顶点的图,可能有多少棵支撑树?
- n=1 1
- n=2 1
- n=3 3
- n=4 16
- n=5 125…
- [Cayley]( http://en.wikipedia.org/wiki/Cayley ‘s_formula) 公式:完全图 有 棵支撑树
改进思路:极短跨边
- 排除环路中最长边
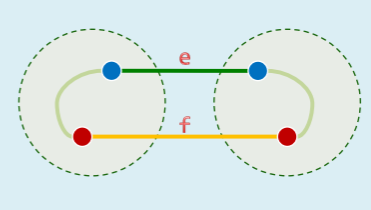
- 观察,任何环路 C 上的最长边 f,都不会被 MST 采用,否则都会有一个更短的边 e 取代之:
- 移除 f 后,MST 分裂为两棵树,将其视作一个割1,
- 则 C 上必有该割的另一跨边 e,既然|e|<|f|,那么只要用 e 替换 f,就会得到一棵总权重更小的支撑树;(Kruskal 算法的依据)
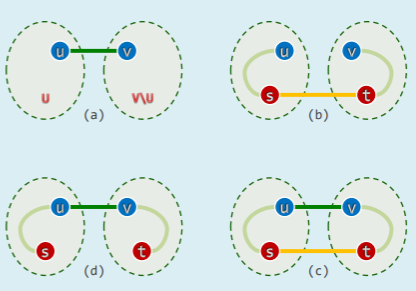
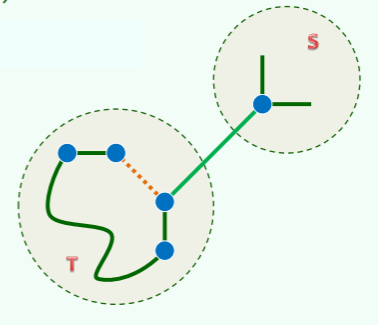
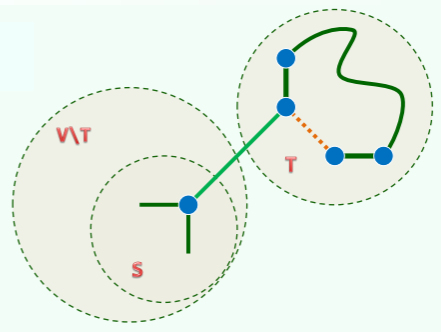
- 容纳割的最短边
- 设 (U; V\U)是 N 的一个割,若 uv 是该割的一条极短跨边,则必存在一棵包含 uv 的 MST(Prim 算法的依据)
- 反证:假设 uv 未被任何 MST 采用,任取一棵 MST,将 uv 加入其中,于是
- 将出现唯一的回路,
- 且该回路必经过 uv 以及至少另一跨边 st
- 接下来,摘除 st 后又恢复为一棵支撑树,且总权重不致增加
- 反之,任一 MST 都必然通过极短跨边联接每一割
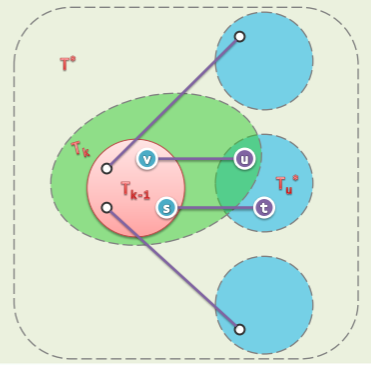
由此,可以得到 Prim 算法的递增式构造方法:
- 首先,任选:
- 不断地将 扩展为 :
- 由此前的分析,只需将 视作原图的一个割,则该割所有跨边中的极短者即是
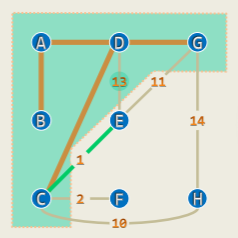
实例
正确性
- 设 Prim 算法依次选取了边{ e2, e3, …, en },其中每一条边 ek,的确都属于某棵 MST
- 但在 MST 不唯一时,由此并不能确认,最终的 T 必是 MST(之一),此时由极短跨边构成的支撑树,未必就是一棵 MST
- 可行的证明:在不增加总权重的前提下,可以将任一 MST 转换为 T,每一 Tk 都是某棵 MST 的子树,1 ⇐ k ⇐ n —— 6-28题
实现
- 在图 G 及其子图中,每一轮都为可在一条路径可达的节点标记优先级 priority,其值决定于已确定范围到目标点的距离;
- 套用 PFS 框架,每一轮 SPT 的增长: ,
- 只需要选出优先级最高的跨边 CROSS及其对应顶点 ,
- 将其接入 即可,随后再更新 中所有顶点的优先级;
- 只需要选出优先级最高的跨边 CROSS及其对应顶点 ,
- 需要注意,优先级随后可能改变(降低)的顶点,必定与 邻接;
- 因此只需枚举 的每一邻接顶点 ,并取
因此对应于 Prim 的优先级更新器如下:
template <typename Tv, typename Te> struct PrimPU { //针对Prim算法的顶点优先级更新器
virtual void operator()( Graph<Tv, Te>* g, Rank v, Rank u ) {
if ( UNDISCOVERED == g->status( u ) ) //对于v每一尚未被发现的邻接顶点u
if ( g->priority( u ) > g->weight( v, u ) ) { //按Prim策略做松弛
g->priority( u ) = g->weight( v, u ); //更新优先级(数)
g->parent( u ) = v; //更新父节点
}
}
};
整体 Prim 算法如下:
template <typename Tv, typename Te> //Prim算法:无向连通图,各边表示为方向互逆、权重相等的一对边
void Graph<Tv, Te>::prim( Rank s ) { // s < n
reset(); priority ( s ) = 0;
for ( Rank i = 0; i < n; i++ ) { //共需引入n个顶点和n-1条边
status( s ) = VISITED;
if ( -1 != parent( s ) ) type( parent( s ), s ) = TREE; //引入当前的s
for ( Rank j = firstNbr( s ); - 1 != j; j = nextNbr( s, j ) ) //枚举s的所有邻居j
if ( ( status( j ) == UNDISCOVERED ) && ( priority( j ) > weight( s, j ) ) ) //对邻接顶点j做松弛
{ priority( j ) = weight( s, j ); parent( j ) = s; } //与Dijkstra算法唯一的不同之处
int shortest = INT_MAX;
for ( Rank j = 0; j < n; j++ ) //选出下一极短跨边
if ( ( status( j ) == UNDISCOVERED ) && ( shortest > priority( j ) ) )
{ shortest = priority( j ); s = j; }
}
}
Kruskal 算法求 MST
描述
回顾 Prim 算法:
- 最短边,迟早会被采用
- 次短边,亦是如此
- 再次短者,则未必,因为可能出现回路!
Kruskal:贪心原则
- 根据代价,从小到大依次尝试各边,只要“安全”——次短即可,就加入该边
- 但是,每步局部最优 = 全局最优?确实,Kruskal 很幸运…
Kruskal 算法:
- 维护 N 的一个森林:F = (V; E’) ⊆ N = (V; E)
- 初始化:
- 包含 n 棵树(各含 1 个顶点)和 0 条边
- 将所有边按照代价排序
- 迭代,直到 F 成为1棵树
- 找到当前最廉价的边 e
- 若 e 的顶点来自 F 中不同的树,则
- 令 E’ = E’ ∪ {e},然后
- 将 e 联接的 2 棵树合二为一
- 整个过程共迭代 n-1次,选出 n-1条边
正确性
定理:Kruskal 引入的每条边都属于某棵 MST
- 设:边 e = (u, v)的引入导致树 T 和 S 的合并
- 若:将 (T; V\T)视作原网络 N 的割,则:e 当属该割的一条跨边
- 在确定应引入 e 之前
- 该割的所有跨边都经 Kruskal 考察
- 且只可能因不短于 e 而被淘汰
- 故:e 当属该割的一条极短跨边
- 与 Prim 同理,以上论述也不充分,为严格起见,仍需归纳证明:Kruskal 算法过程中不断生长的森林,总是某棵 MST 的子图。
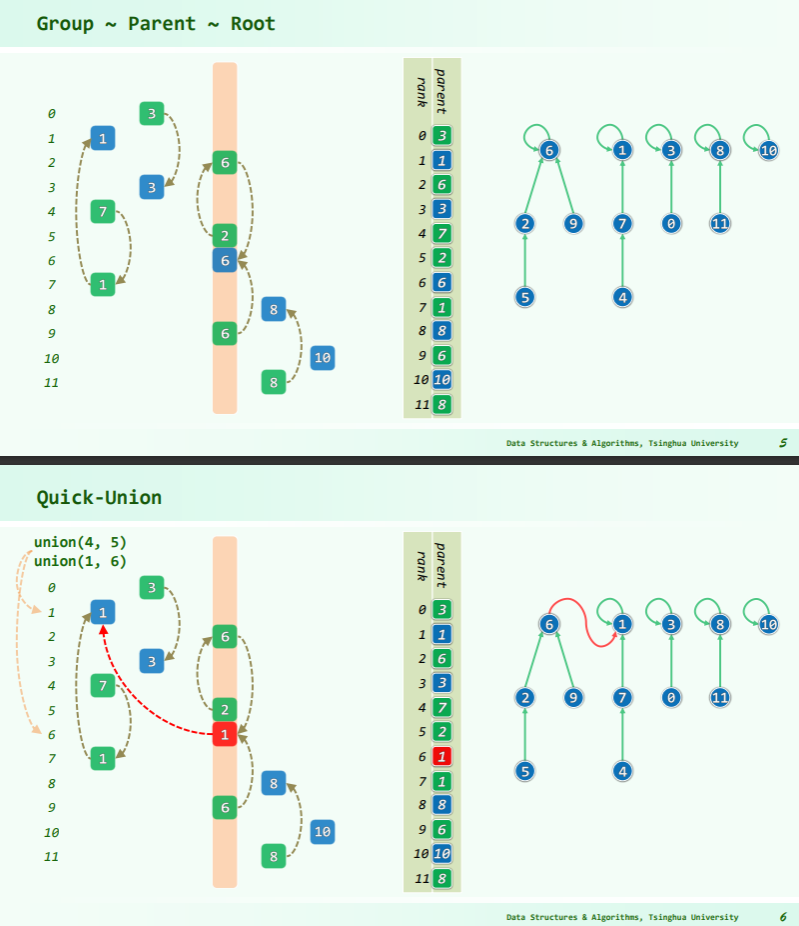
并查集
MST 的 Kruskal 算法
伪代码:
算法虽简单,但需要相应的数据结构来支持……具体来说,维护一个森林,查询两个结点是否在同一棵树中,连接两棵树。
抽象一点地说,维护一堆 集合,查询两个元素是否属于同一集合,合并两个集合。
其中,查询两点是否连通和连接两点可以使用并查集维护。
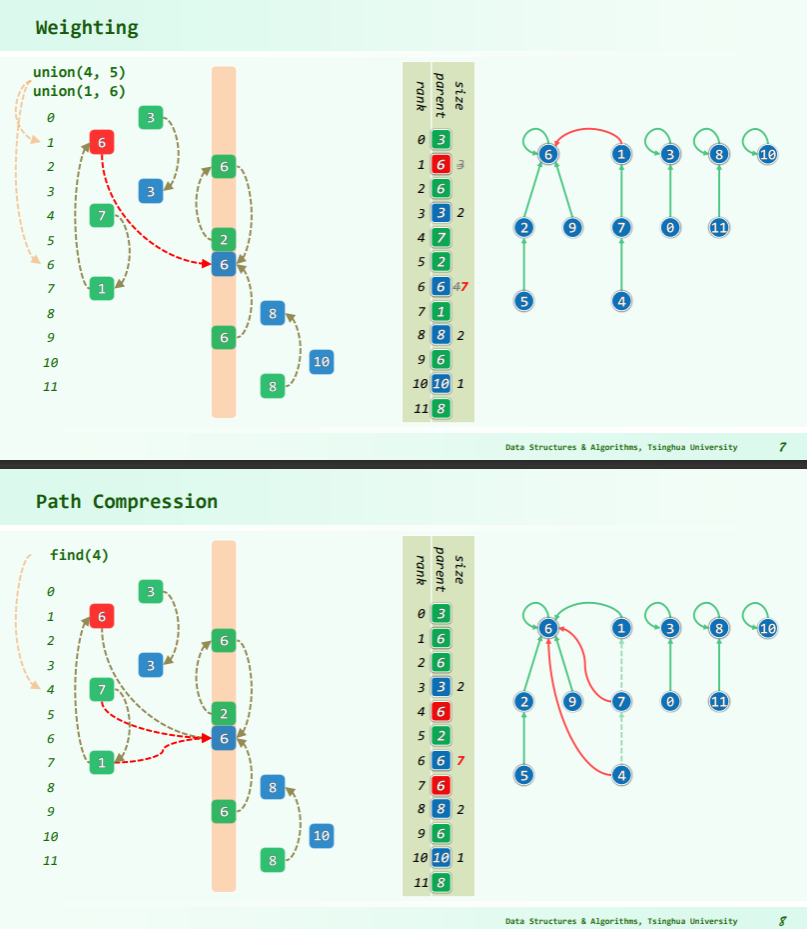
如果使用 的排序算法,并且使用 或 的并查集,就可以得到时间复杂度为 的 Kruskal 算法。
[! note]+ Kruskal 算法的证明 思路很简单,为了造出一棵最小生成树,我们从最小边权的边开始,按边权从小到大依次加入,如果某次加边产生了环,就扔掉这条边,直到加入了 n-1 条边,即形成了一棵树。
证明:使用归纳法,证明任何时候 K 算法选择的边集都被某棵 MST 所包含。
- 基础:对于算法刚开始时,显然成立(最小生成树存在)。
- 归纳:
- 假设某时刻成立,当前边集为 F,令 T 为这棵 MST,考虑下一条加入的边 e。
- 如果 e 属于 T,那么成立。
- 否则,T+e 一定存在一个环,考虑这个环上不属于 F 的另一条边 f(一定只有一条)。
- 首先,f 的权值一定不会比 e 小,不然 f 会在 e 之前被选取。
- 然后,f 的权值一定不会比 e 大,不然 T+e-f 就是一棵比 T 还优的生成树了。
- 所以,T+e-f 包含了 F,并且也是一棵最小生成树,归纳成立。
指向原始笔记的链接 Footnotes
↩
- Gabow, H. N., & Tarjan, R. E. (1985). A Linear-Time Algorithm for a Special Case of Disjoint Set Union. JOURNAL OF COMPUTER AND SYSTEM SCIENCES, 30, 209-221. PDF
Tarjan, R. E., & Van Leeuwen, J. (1984). Worst-case analysis of set union algorithms. Journal of the ACM (JACM), 31(2), 245-281.ResearchGate PDF ↩
Yao, A. C. (1985). On the expected performance of path compression algorithms.SIAM Journal on Computing, 14(1), 129-133. ↩
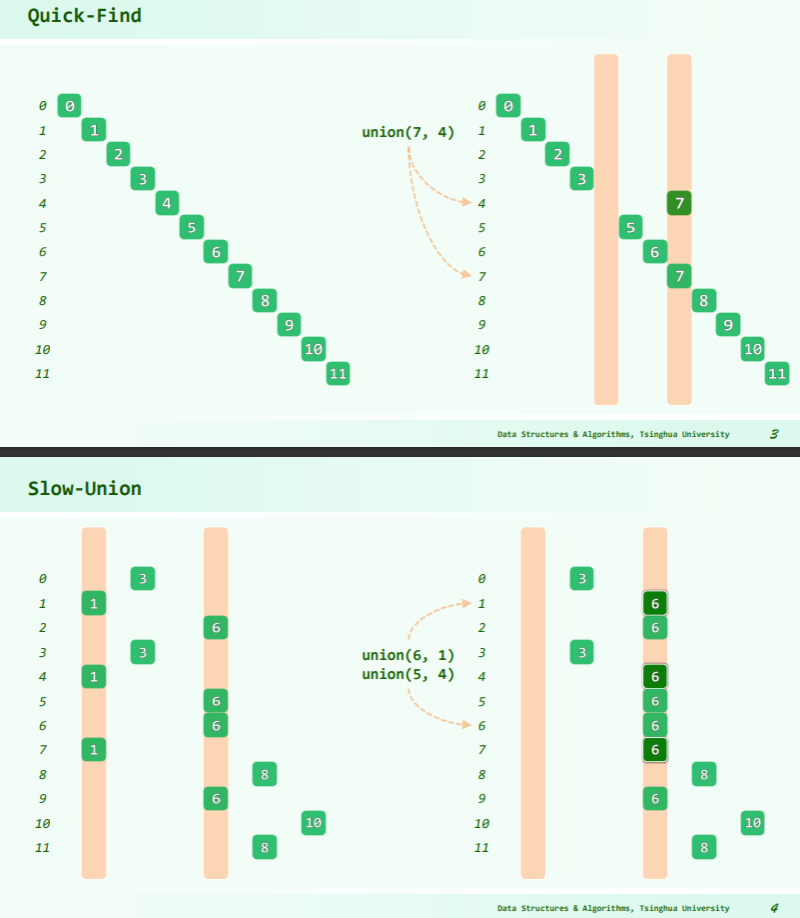
//Quick-Find(就是启发式合并)
class UnionFind:
def __init__(self, n): #group[]记录各元素所属子集;初始各成一类,以[0,n)间整数标识
self.g = self.n = n; self.group = [ k for k in range(n) ]
def find(self, k):
return self.group[k]
def union(self, i, j):
iGroup , jGroup = self.group[i] , self.group[j]
if iGroup == jGroup: return
for k in range(self.n):
if (self.group[k] == jGroup): self.group[k] = iGroup
self.g -= 1
Floyd-Warshall 算法求 SPT
直觉: 依次将各顶点作为源点,调用 Dijkstra 算法,其时间复杂度 = —— 可否更快?
思路: 图矩阵 ⇒ 最短路径矩阵 效率: O(n^3),与执行 n 次 Dijkstra 相同 —— 既如此,F.W.之价值何在? 优点: 形式简单、算法紧凑、便于实现;允许负权边(尽管仍不能有负权环路) Floyd-Warshall 算法
问题描述
u 和 v 之间的最短路径可能是
- 不存在通路,或者
- 直接连接,或者
- 最短路径 (u, x) + 最短路径 (x, v)
将所有顶点随意编号:1, 2, …, n 。定义: 中途只经过前 k 个顶点中转,从 u 通往 v 的最短路径长度:
蛮力递归
weight dist( node * u, node * v, int k )
if ( k < 1 ) return w( u, v );
u2v = dist( u, v, k-1 ); //经前k-1个点中转
for each node x { u, v } //x作为第k个可中转点
u2x2v = dist( u, x, k-1 ) + dist( x, v, k-1 ); //递归
u2v = min( u2v, u2x2v ); //择优
return u2v;
动态规划
for k in range(0, n)
for u in range(0, n)
for v in range(0, n)
A[u][v] = min( A[u][v], A[u][k] + A[k][v] )
蛮力递归会存在大量重复的递归调用,可以使用动态规划记忆化:维护一张表,记录需要反复计算的数值:
Footnotes
-
去掉其中所有边能使一张网络流图不再连通(即分成两个子图)的“边集”称为图的割(英语:cut) ↩