Regularized Hypothesis Set
由前文论述,过拟合的一个原因就是假设集 过于复杂,那么如果能将复杂的假设集退化到简单的假设集,不就可以降低过拟合程度吗?——这就是正则化!
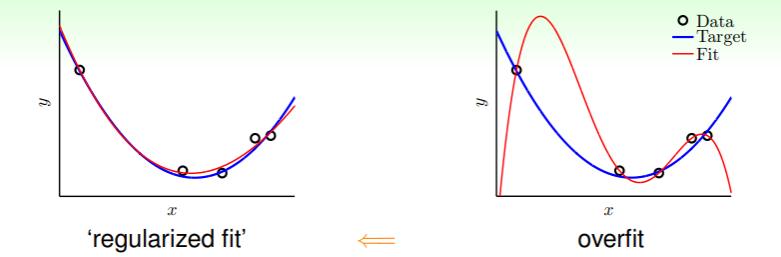
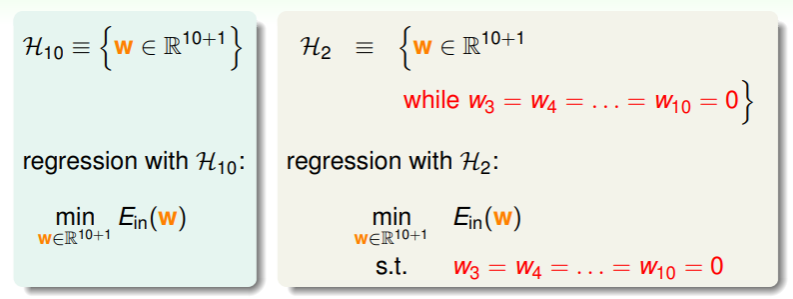
- 我们以十阶假设集 和二阶假设集 为例,它们各自可以表示为 和 ,因此 就是 加上一些限制: —— “退化”其实就是“限制”
Steps of Constraint
现在来看看具体如何限制:
- 对于 Regression 算法,在两个不同假设空间的假设与错误评估函数可以如下设置:
- 既如此,我们不妨直接使用 中的假设,并且可以进一步放宽限制,不是必须 这八个权重为 0 ,而是 中任意八个权重为 0 :
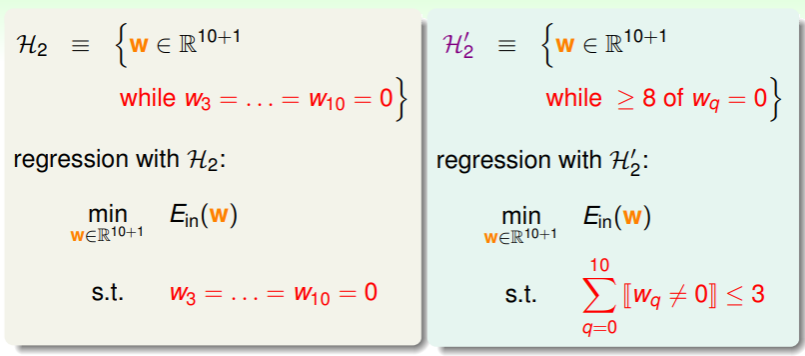 这样的好处是 不仅比 更加灵活,但相对 发生 overfit 的风险又更低;不过坏消息是要从 中挑选出最佳的假设,时间复杂度是 NP-hard 的;
这样的好处是 不仅比 更加灵活,但相对 发生 overfit 的风险又更低;不过坏消息是要从 中挑选出最佳的假设,时间复杂度是 NP-hard 的; - 进一步思考, 的权重向量是稀疏的(sparse),因此不妨考虑权重向量的欧氏距离,如果其欧氏距离小于一个常数,就认定其满足了对高维假设集的限制:
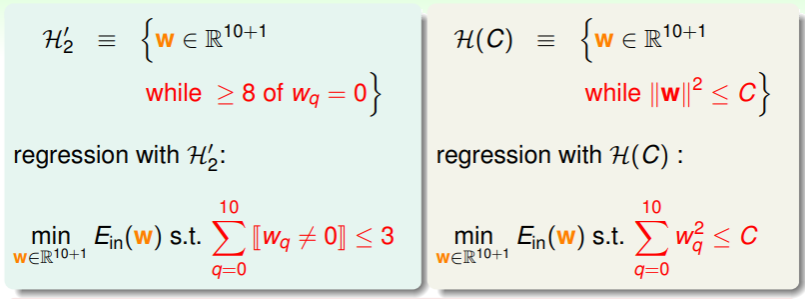
- 考查 ,它其实与 有一定重叠,但又不完全相同,
- 并且随着 C 的增大,有这样的关系: ,在假设集 中最佳的假设称为正则化的假设 ,其选取的复杂度为 ;
Name history of Regularization
正则化(Regularization)在机器学习中的命名来源与其在数学和统计学中的应用有关。在更广泛的背景下,正则化是解决病态问题(ill-posed problems)或防止过拟合(overfitting)的一种方法。这个概念在数学、统计学、计算机科学等多个领域都有应用,尤其在机器学习中扮演着重要角色。
- 病态问题(Ill-posed problems) 在数学和统计学中,一个问题被认为是“病态的”(ill-posed),如果它不满足所谓的哈达马条件(Hadamard conditions),这些条件通常包括:
解的存在性:问题必须有解。
解的唯一性:问题的解必须是唯一的。
解的稳定性:解对于初始条件的小变化是连续的或稳定的。 如果一个问题不满足这些条件之一,那么它可能很难解决或者解决方案可能不可靠。例如,在逆问题(inverse problems)中,这些条件往往不被满足,导致解决这类问题变得复杂。
正则化的作用 在面对病态问题时,正则化的主要目的是使问题变得更加“良态”(well-posed)。通过引入额外的信息或约束(例如惩罚项),可以帮助稳定解的计算,保证解的唯一性或连续性。在机器学习中,这通常意味着在模型复杂度和训练数据拟合之间寻找平衡,防止模型过于复杂而导致的过拟合。
在机器学习中的应用 在机器学习中,正则化通过在损失函数中添加一个额外的项(例如 L1 或 L2 惩罚项)来实现。这个额外的项惩罚模型的复杂度,通常与模型参数的大小成正比。通过这种方式,正则化鼓励模型学习更简单、更泛化的模式,而不是复杂且可能仅适用于训练数据的模式。
练习:理解
Weight Decay Regularization
那么如何从 中选取最佳的假设 呢?和之前一样,我们要考虑使 最小的假设,写成矩阵和向量运算的形式如下:
这里 项可以写成向量内积的形式: ,并且 的含义是最佳的 可选范围是在半径为 的(超)球体内(hypersphere)。
Calculate the minimum : Lagrange Multiplier
回想多元函数有约束极值问题的拉格朗日乘数法,我们这里要求 ,也要用到这个方法:
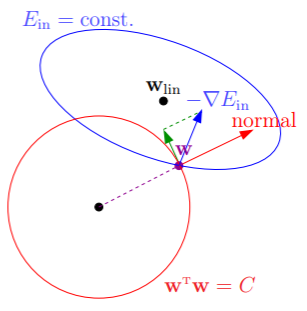
- 上图中, 下降的方向是梯度的反方向 ,并且如果没有限制的话,会一直下降到线性回归问题里探讨过的 ,
- 然而 可选的范围不超过半径为 的圆,因此 大多情况时在圆的边界上,那么如何判断边界上一点是否已经是最小的呢?我们选取该点处切平面的法向量为 ,因此如果该点处梯度的反方向 不与 向量平行——即有沿着垂直于 方向的分量,那么就可以不断地降低 而又不超过限制,
- 因此,当 一直降低到最小,那么就代表着此处梯度的反方向与 平行,即梯度 与最佳的 成正比: ,我们由拉格朗日乘数法,就是要找到 满足 ,
- 我们不妨设 ,在 线性回归问题 中我们也曾探讨过 的结果,因此解上面的式子相当于解 ,则得到 ;
- 这个矩阵一定是可逆的,因为 是半正定的,加上一个正的单位矩阵,必然是正定的,因此也必然可逆,
- 在统计学中, 也称为 ridge regression ;
Calculate the Minimum : Transform to Constraintless
或者,从另一个角度来看,要使得 ,等价于使 取得最小(对原式做积分),其中 称为 regularizer ,而整个式子称为 augemented error —— 。
如此,实现了化受限为不受限,因此使得 最小的 就是受限问题中要求的 : 。
How Affect?
从上面的论证也可以看出, 的作用与限制 是一致的,因此我们可以直接探讨 大小的影响。那么 对拟合程度的影响究竟是什么呢?
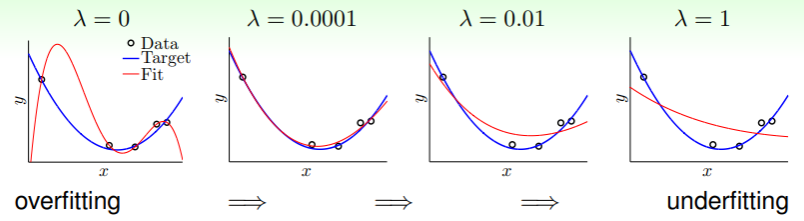
- 相当于没有做任何约束,即没有任何正则化的要求;而随着 的增大,约束逐渐增强,越大的 等同于越短的 ,也就是越小的 ;
- 不过当 过大时,也会导致得到的假设与目标函数偏离变大,也就是 underfitting ;
- 这就是正则化的哲学:a little regularization goes a long way!
- 我们称 中 这一项为 weight-decay regularization ;
Legendre Polynomials
在实现维度之间的转换时,我们需要使用转换函数 ,我们知道它是一个多项式函数,因此设置为 。不过这样的函数有一些问题,比如在特征向量 中所有维的取值都在 区间内时,高维的部分将会变得很小,因此其对应的权重就会变得很大,而我们又要求权重不应超过某个限制,因此这代表着对高维的惩罚较大,这并不公平。
这个问题的关键就是因为这 个坐标不是垂直的,导致对低维的容忍度比较高,而对高维的惩罚比较大,因此我们应当做一些坐标转换——在多项式的空间里找出一些垂直的基底,各基底的内积为 0 ,正交化的转换函数记作 ,称为 Legendre Polynomials :

练习: 与 的联系
- 第三个式子在几何意义上就是限制把最佳解包围在内;
Regularization and VC Theory
Vs. VC Bound Guarantee
我们前面提到正则化就是使 受到某种限制:
,这种限制等价于使 最小化:
,联系之前所学的 VC 理论 ,其中也相当于对 做出了一些限制:
。因此类比,最小化 的过程似乎就是间接地获取没有 限制的 VC bound 的保证的过程。
详细地对比 和 VC bound :
- 中称为 regularizer 的 项,含义是一个假设的复杂度,其值越大,代表假设的维数越高,假设越复杂;不妨记作 ,
- VC bound 中 项是对一个假设集的复杂度的评估;
- 因此如果 能够对 做出合理的代表,那么就可以认为 可以在一定程度上代表 ,并且比 更加精确。
因此从 VC dimension 的角度来仔细查看 的计算公式:
- 这个模型中复杂度为 ,这是因为在最小化的过程中要考虑到所有样本 ,
- 但是由于限制 的存在,并不是所有 都会用到,因此我们称在限制存在的条件下的 VC dimension 为 effective VC dimension : ,
- 这意味着尽管 可能很大,但对学习算法 进行正则化后,有效 VC dimension 可能非常小。
练习:理解有效 VC dimension
General Regularizers
为了推广正则化,我们需要尝试提出应对不同场景的正则化方式:
- target-dependent:在预先知道目标函数或其部分特征时,我们可以利用这些特征进行正则化:比如如果我们预知目标函数是一个偶函数,那么就可以使奇次项的权重全都变小;
- plausible:在希望目标函数平滑、简单时,可以使用 sparsity (L1) regularizer
- friendly:在希望目标函数容易优化时,可以使用 weight-decay (L2) regularizer
- 除此之外,如果我们不能确定正则化后的结果是否变得更好,那还有 把关,只要其为 0 ,就相当于没有进行正则化。
因此,更加一般的, 。
L1&L2 Regularizer
L2 Regularizer 是我们之前谈到的通过拉格朗日乘数法可以很快实现找到最优 的正则化方式:
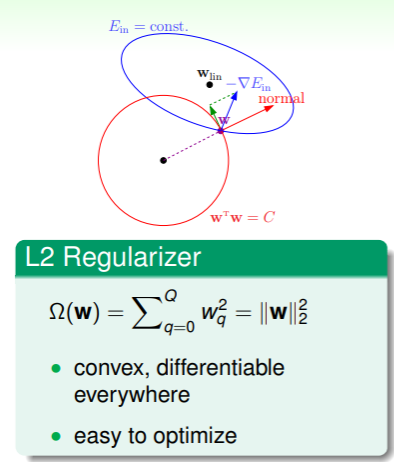
- 其中对 来说,在任何地方都是凸的、可微的;
而 L1 Regularizer 是 one-norm 的,具体形式是绝对值函数:
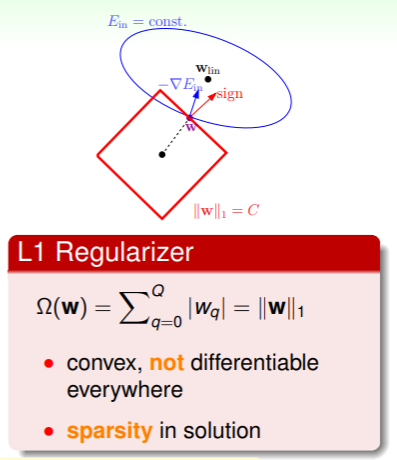
- 这时对 来说虽然是凸的,但在某些地方不再可微,虽然解起来麻烦一些,不过原理还是拉格朗日乘数法,只要 不与当前点的法方向平行,那就可以继续下降;
- 总之,L1 Regularizer 的解通常位于顶点上,此处 的部分维将会是 0 ,因此可以成为稀疏的(sparse),因此 L1 Regularizer 通常认为是计算起来简单的。
什么是 one-norm ?
Noise and
噪音的存在会使得正则化的过程中不再平滑、可微,那么具体的影响是什么呢?
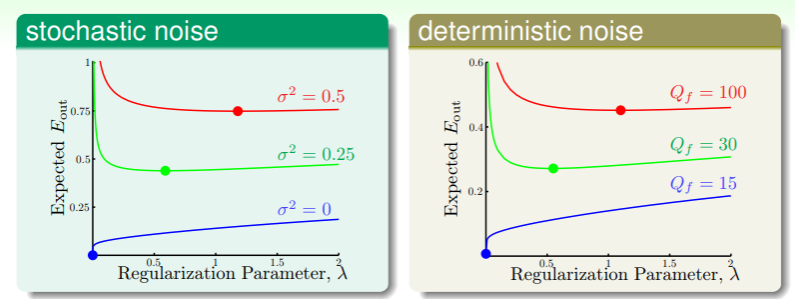
- 上图表明,噪音强度越大,就越需要正则化,就像在越颠簸的路段上行车越需要不停地点踩刹车;
- 但是噪音强度我们事先无法确定,因此选择合适的正则化方式尤为重要,这就涉及到下一章的内容——验证。
练习:选择最合适的正则化方式
- 这里的正则化方式 使用了 Legendre polynomial 多项式,在高维时惩罚较大,因此适合使用于低维的假设集;