Learning 究竟是否可行?如何判断?
Learning is Impossible?
机器学习的反对者通常认为模型都是基于已知预测未知,而如此必然会出错,因此 Learning 是不可能成立的,例如下面两个例子:
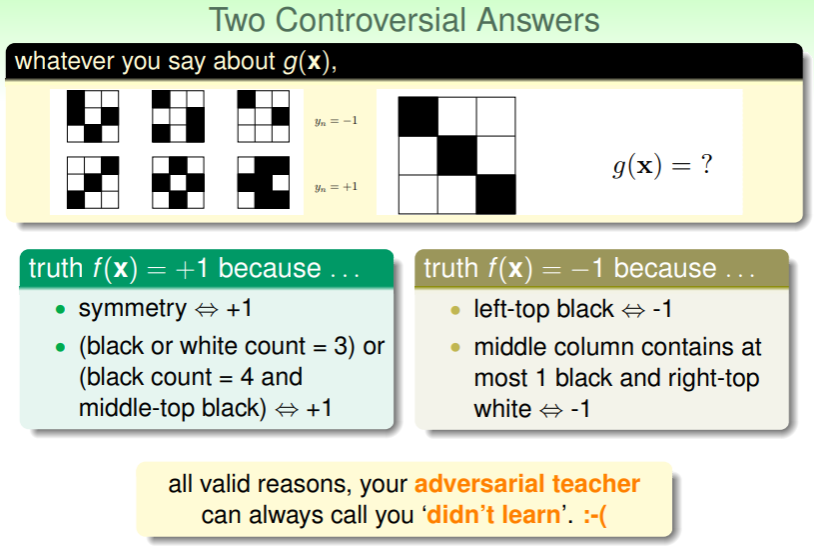
- 对于预测这个新图形的输出结果,不论+1 或-1 都可以反驳,因此完全可以唱反调——无论回答什么都是错误的:
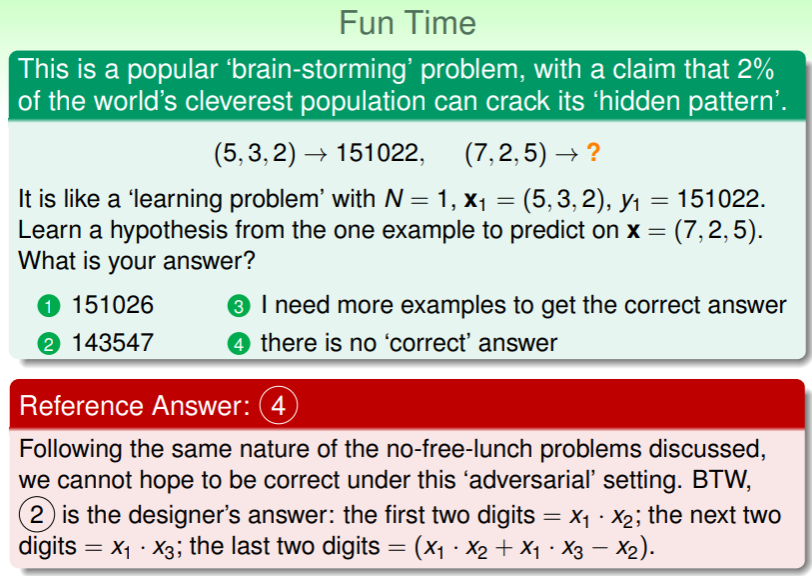
- 对于预测一个 3bit 的向量所对应的输出,一共有 的空间,若已知 5 个样本,对剩余三种样本进行预测,则会产生 个可行的 f ,那么根据 进行推演的 g 无论选择什么,都必然不会完全正确:
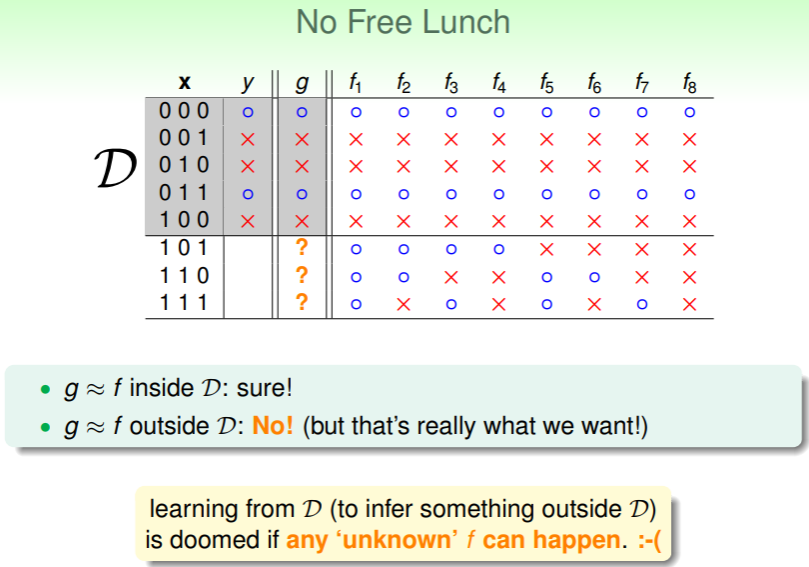
- “天下没有免费的午餐”是对这个案例的最好概括——预测必然基于过去而面向未来,过去是确定的,未来是不确定的,想要得到确定的未来,必然要付出某种代价;
- 事实上,犯错是必然的,但也正是我们所需要的,只有接纳某些犯错,才会获得有价值的结果。
练习:没有免费的午餐
Probability to the Rescue
但机器学习实际的目标是以尽可能低的代价容忍犯错,从而获得尽可能有效的结果以指导后续的预测、估计等行为。例如数理统计中的一个经典问题,如何从无穷多个二色球的罐子里,估计不同颜色小球的比例?
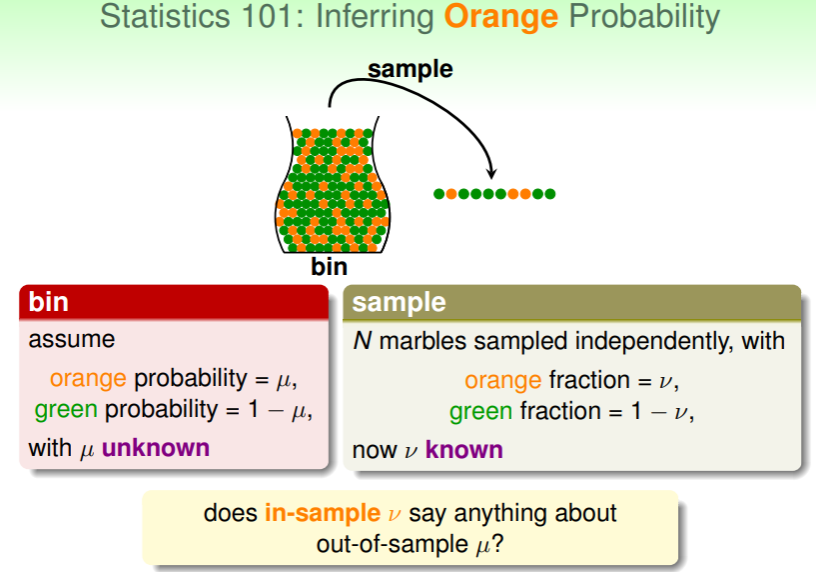
- 若假定罐子里橙色小球的比例为 ,而这个比例是未知的;我们能做的仅是从罐子里取出一定数量的样本,根据样本中橙色小球的比例 来估计 ;
- :样本的比例 当然不能完全代表罐子中的实际比例 ,但是却能够以某种概率尽可能接近地估计 —— Hoeffding’s Inequality!
Hoeffding’s Inequality
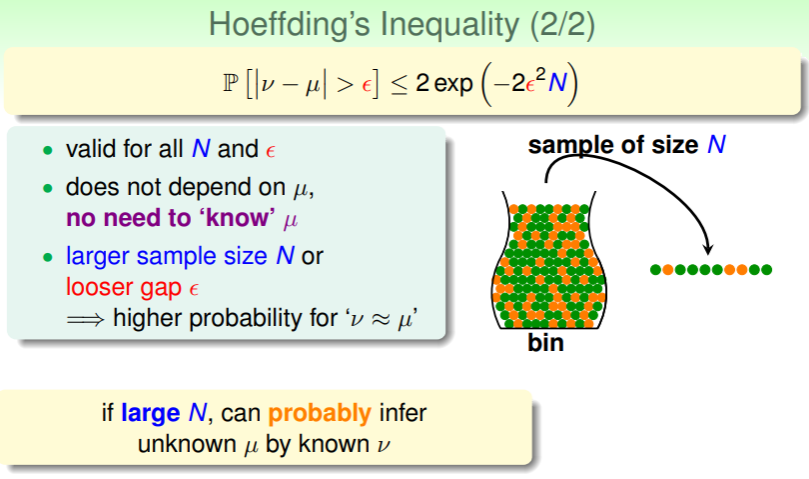
Hoeffding’s Inequality 的形式为:
其含义是:在抽取样本的数量 N 极大时, 收敛于 ,换言之, 这个判断是 probably approximately correct (PAC) 的。
因此回到估计橙色小球比例的问题:
- N 的数量越大,就能以越小的差距 获得对 的合理估计 :
Different between Hoeffding's and Chebyshev's
Hoeffding’s Inequality 和 Chebyshev’s Inequality 都是概率论中用来估计随机变量偏离其期望值的概率的不等式,但它们有一些关键的区别和联系:
- 适用范围:
- Hoeffding’s Inequality:专门用于有界随机变量。它提供了一个概率上限,用于衡量独立随机变量之和偏离其期望值的程度。这个不等式对于任何有界的随机变量都有效,无论其分布如何。
- Chebyshev’s Inequality:适用于任意分布的随机变量,只要其期望值和方差是有定义的。这个不等式不要求随机变量是有界的,但需要已知其方差。
- 形式和精确度:
- Hoeffding’s Inequality:通常提供一个更紧的(即更小的)概率上限,特别是对于有界变量。它对于样本量的增加非常敏感,可以有效利用这一信息。
- Chebyshev’s Inequality:通常不如 Hoeffding’s Inequality 紧密,特别是对于有界变量。但是,它的优势在于适用于更广泛的情况,尤其是当关于随机变量分布的信息很少时。
- 数学表达式:
- Hoeffding’s Inequality:对于独立的有界随机变量 ,其和 与其期望值 的偏差被给定概率界限所限制。
- Chebyshev’s Inequality:对于任意随机变量 ,其值与其期望值 的偏差超过 个标准差的概率被限制为 。
总的来说,这两个不等式都是处理随机变量偏离其期望值的强大工具,但它们各自在不同的情境下更为适用。Hoeffding’s Inequality 在处理有界变量时特别有用,而 Chebyshev’s Inequality 在对随机变量的分布信息较少时更加通用。
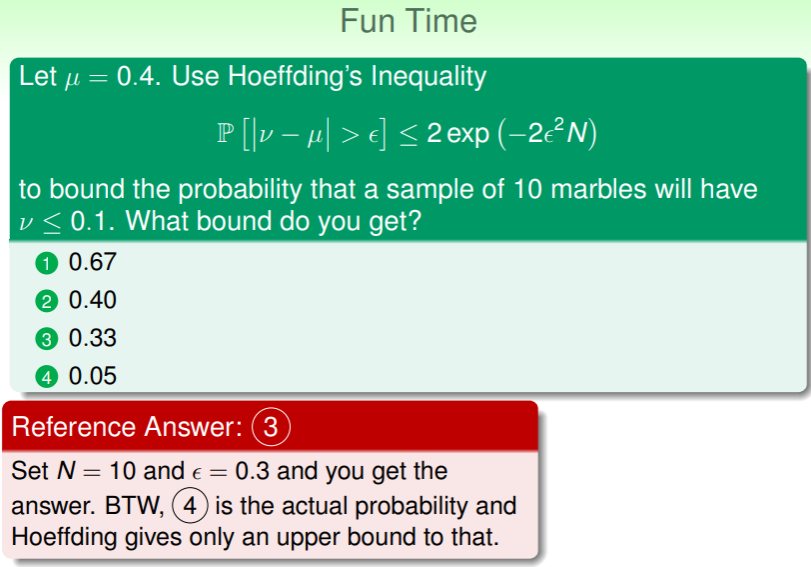
练习:利用 Hoeffding
Connection to Learning
From Probability to ML
那么,如何从上述的概率统计推演到机器学习呢?
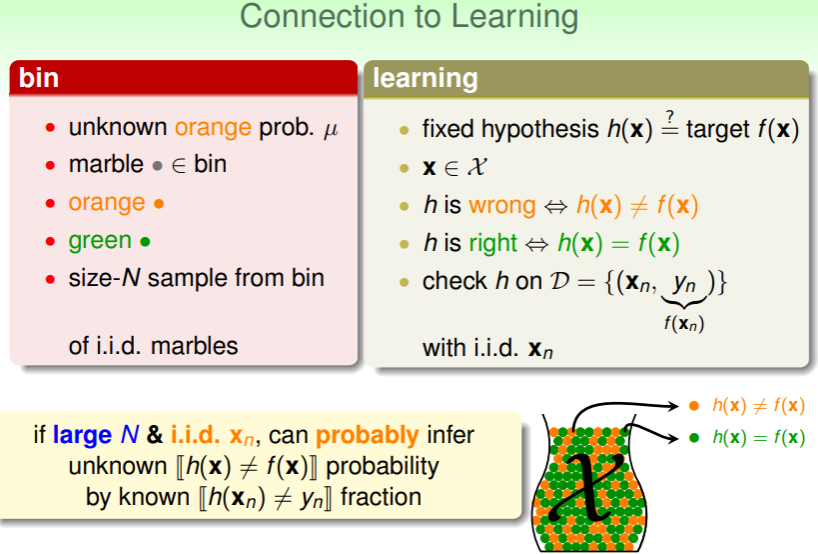
- 罐子中我们具体的问题或信息是橙色小球的比例 和抽样样本的数量 N ,抽象为 learning ,我们可以提出一个假设函数 来估计能给出正确判断的目标函数 ,
- 对每个样本 ,假设 能够正确实现估计 ,那么在抽样样本集 上检查 的比例(即,正确率),则可以从该比例推断在完整数据集(即罐子里) 是正确的概率;
and
从而,我们可以如下完善 Machine Learning 的流程图:
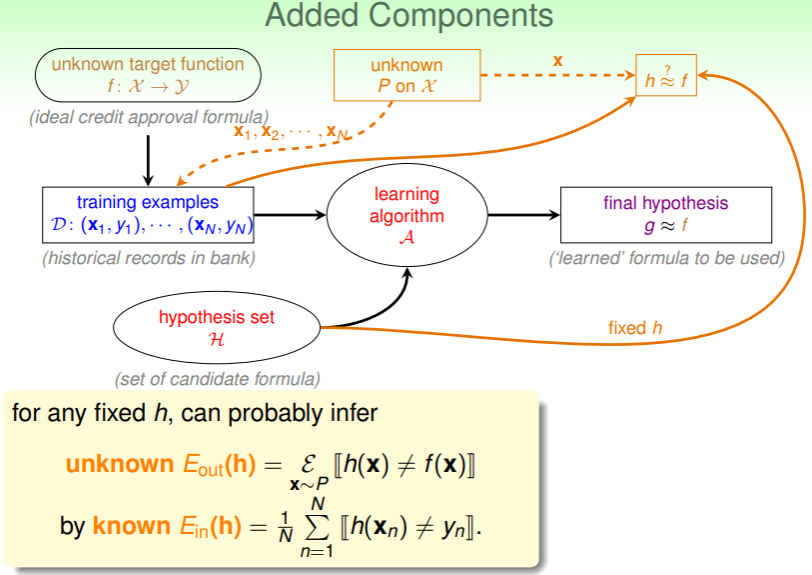
对于任意同一个假设 ,我们都可以从已知的训练集中犯错的比例:
估计全局中 对 的估计的犯错率:
,这里 是对服从特定分布的样本 中假设与目标不同的期望。
同样,Hoeffding’s Inequality 也可以用于这两种犯错概率的估计:
,这意味着对于任意的 N 和 都能推导出犯错率的上界,而不必知道确切的 ,即 和 橙色小球的比例 仍然是未知的, 是 probably approximately correct 的;
从而,如果 且 相当小,我们也可以认为 也足够小,此时 可以作为 的估计。
Verification Flow
然而,对于大多数问题,一个固定的 显然是不能得到很好的估计的,否则,岂不是大量问题有了通解?因此,我们真正需要的 learning 是从假设空间 中选取一个针对特定问题合适的 ,那么,选择的流程是怎样的?
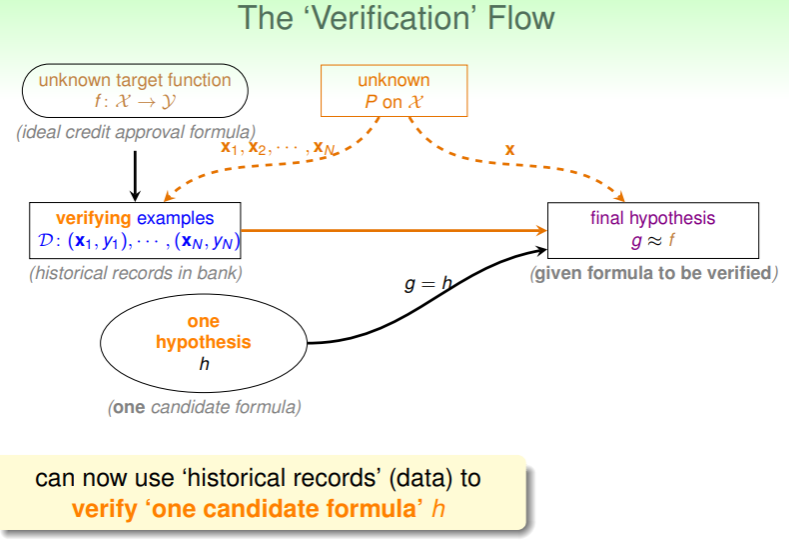
- 对于一个假设 ,我们需要找一些新的资料(即测试集,verify/test examples),看看从之前旧的数据中获得的 是否还能在新的资料里足够优秀;
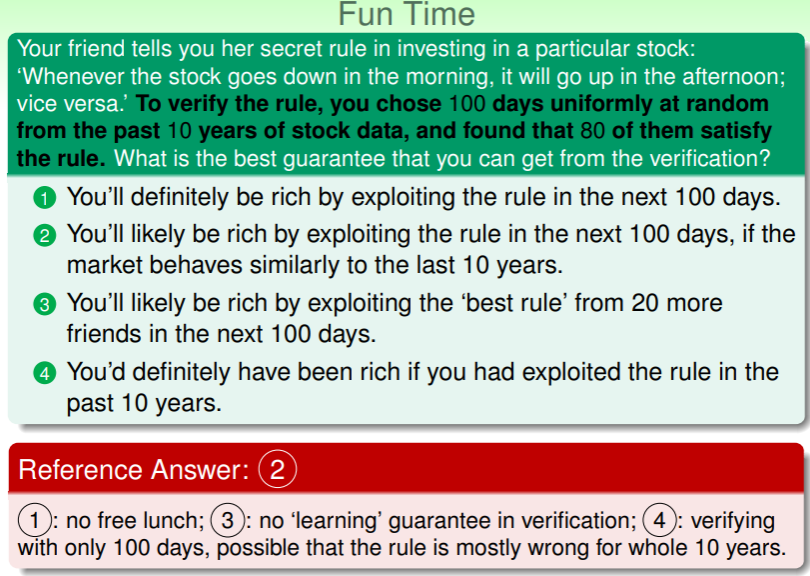
练习:由过去推导未来
Connection to Real Learning
BAD data
从概率推广到机器学习的理论还不够,我们很容易从前文得知,一切估计都基于预测的概率,那么必然会出现各种奇奇怪怪的情形:
- 我们从同一个罐子里抽样,每次获取的都是局部的信息,局部信息千差万别,可以尽信吗?当然不行,但,为何不行?什么又是行的呢?从概率论的角度,我们可以知道抽样的结果全为非橙色小球的概率极小 ,但只要取样次数 M 足够大,总还是有可能发生的: :
我们把 和 差距过大的采样,称为 BAD sample ,其会导致糟糕的预测结果。类似的,对于一个特定的假设 ,在某个抽样集 上产生的 远小于全局的 ,就称其为 BAD data 。Hoeffding 不等式能够保证对于单个假设 ,其在不同采样的 上是 BAD data 的概率很小:
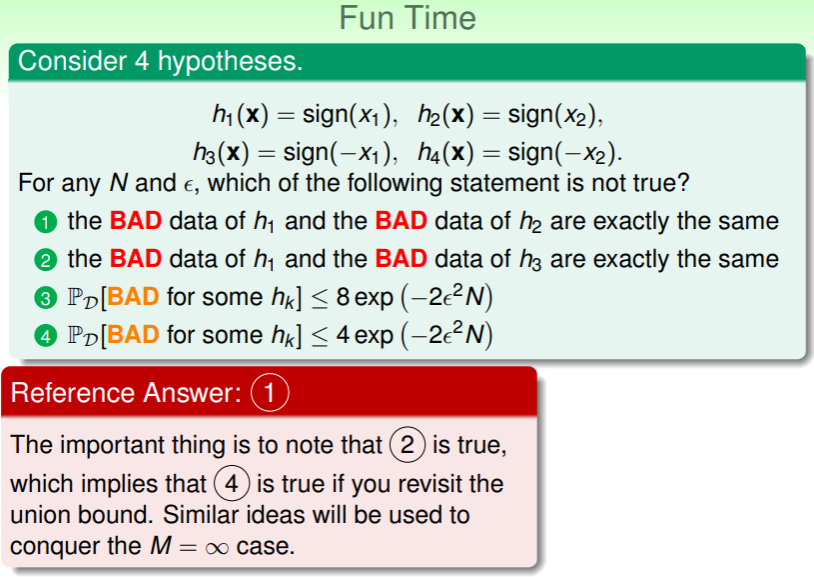
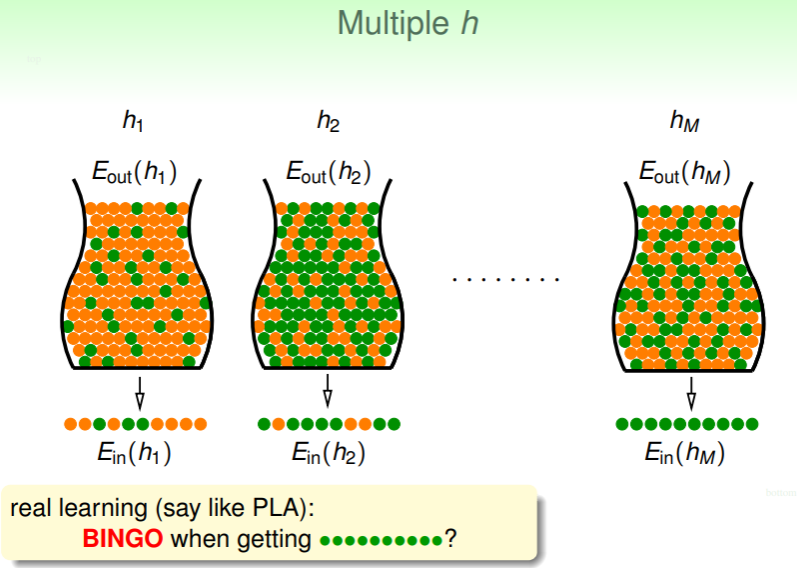
但如果对于 M 个假设 ,每个假设都或多或少在样本 上是 BAD data,如果只要样本 对某个 是 BAD data,就标记为 BAD ,那有没有 对所有假设 都不是 BAD 的呢?这样用它来进行训练得到准确度的概率必然更高:
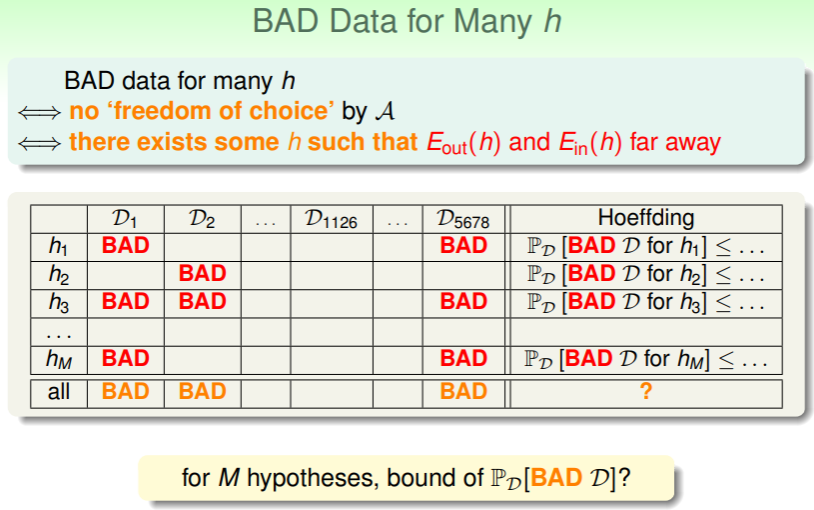
- 考查 ,可以使用概率加法公式求得上界:
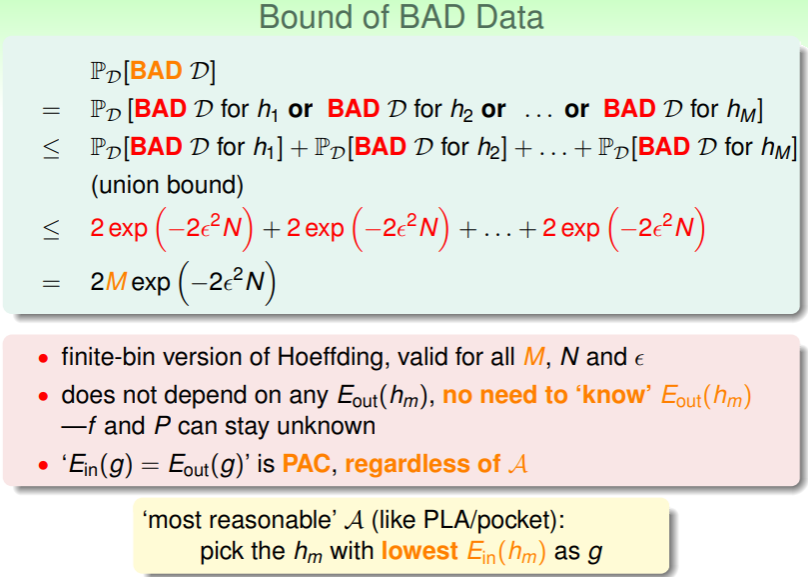
- 这个式子告诉我们,不必知道 的确切数据,我们仍能在犯错概率不超过 的情况下认为 是 PAC 的,无论学习算法 是什么;
这也就佐证了前文我们直接选取 最小的假设 作为 g 的可行性。
Statistical Learning Flow
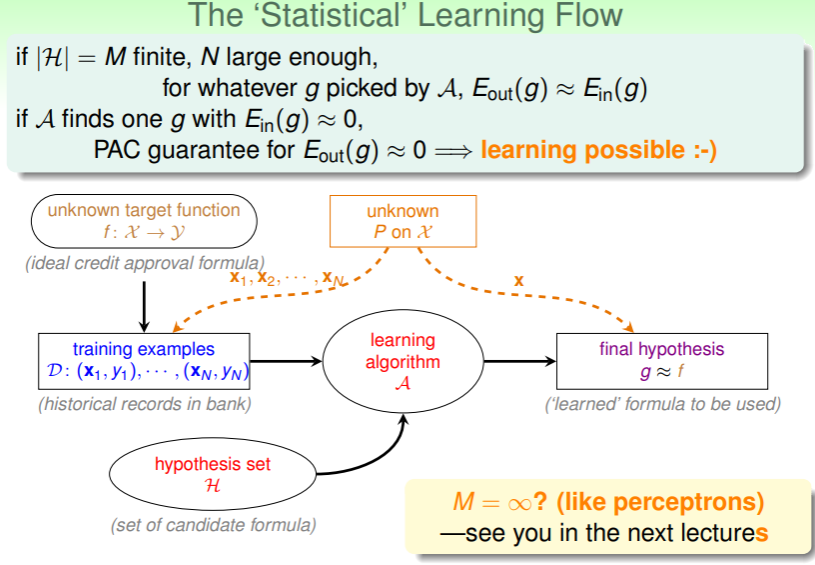
- 总之,对于有限大小的假设集 ,只要采样数据 N 足够大,那么通过学习算法选出的估计 g,都能够满足 ,
- 如果能够找到 ,那么就能 PAC 地认为 也成立;
练习:理解 BAD data 与犯错概率的上界